- Как работает схема контроллера для бесколлекторного мотора (BLDC)
- Базовая схема для экспериментов с BLDC-моторами на ATtiny2313
- Трехфазная схема контроллера
- Принцип работы
- Заключение
- Силовая часть регулятора BLDC двигателей RU
- Резисторы и ключи
- Драйверы MOSFET транзисторов
- Выбор силовых транзисторов
- Драйверы MOSFET ключей
- Выбор драйвера и их многообразие
- 1. Драйверы на основе биполярных транзисторов
- 2. Драйверы на основе MOSFET-транзисторов
- 3. Драйверы с dead-time
- Расчет резисторов в цепи затвора
- Защитные диоды
- Dead-Time
- Датчики тока
- Пример схемы датчиков тока
- Проверка датчиков тока
- Видео:
- Как без переделки запустить автогенератор в режиме мотора
Как работает схема контроллера для бесколлекторного мотора (BLDC)
")
BLDC-моторы (бесколлекторные моторы постоянного тока) все чаще используются в различных приложениях благодаря своей высокой эффективности и долговечности. Однако, для правильной работы таких моторов необходима соответствующая схема контроллера.
Важной частью схемы контроллера являются ключи, которые управляют подачей напряжения на обмотки мотора. Ключи должны быть подобраны таким образом, чтобы справиться с силовыми токами и быть надежными.
Наиболее распространенными типами ключей для контроллера BLDC-моторов являются биполярные транзисторы и полевые транзисторы. Выбор типа ключей зависит от требований к мощности, но в обоих случаях ключи должны быть максимально мощными, чтобы справиться с высокими токами, которые могут протекать в цепях.
Базовая схема контроллера BLDC-моторов включает в себя драйвер, который управляет ключами, и обвязку, которая питает драйвер и ключи. Правильно спроектированная схема обвязки снижает наводку и помехи, и обеспечивает стабильное питание.
Для оценки схемы контроллера необходимо проверить, насколько хорошо протекает ток через резисторы и диоды. Если резисторы слишком горячие, это может свидетельствовать о том, что ток слишком большой или номинал резисторов не соответствует требованиям. В таком случае необходимо выбрать резисторы большего номинала. Также нужно проверить, что напряжение на затворе транзисторов не падает ниже допустимого уровня, так как это может привести к их полной выходной силовых биполярные транзисторы сгорят.
В схеме контроллера также присутствуют датчики, которые позволяют контроллеру «узнать» положение ротора мотора. Обычно используются два датчика, которые расположены под углом 60 градусов друг к другу. Они обеспечивают необходимую информацию контроллеру для правильного управления мотором.
Для контроля и регулировки схемы контроллера можно использовать микроконтроллеры, такие как ATtiny2313. Они могут быть программированы для определения положений ротора и управления ключами в соответствии с требуемыми параметрами.
Базовая схема для экспериментов с BLDC-моторами на ATtiny2313
BLDC-моторы (моторы с бесщеточной постоянной магнитной головкой) широко используются в различных приложениях, таких как электроинструменты, дроны и электроприводы. Однако, перед тем как начать работу с такими мощными моторами, важно иметь базовое понимание схемы контроллера.
Основная цель контроллера BLDC-мотора состоит в том, чтобы управлять напряжением и токами в цепи обмоток статора мотора, так чтобы мотор мог исполнять команды вращения в нужном направлении и с нужной скоростью.
Трехфазная схема контроллера
Базовая схема контроллера BLDC-мотора состоит из трех ключей (транзисторов) и трех обвязок, соединяющих ключи с обмотками статора мотора. В один момент времени один ключ должен быть открыт, а два других закрыты, чтобы воздействовать на положение и скорость мотора.
Ключи могут быть реализованы с помощью транзисторов, диодов (защитные ключи) и драйверов ключей. Драйверы управляют открытием и закрытием транзисторов в нужный момент времени.
В обвязках, которые соединяют ключи с обмотками, находятся датчики, которые могут измерять токи и напряжение в цепи обмоток. Эти измерения помогают контроллеру определить момент времени смены ключей и управлять мотором с высокой эффективностью.
Принцип работы
В случае обычного BLDC-мотора, контроллер должен ориентироваться на положение ротора, чтобы правильно управлять мотором. Для этого существуют два важнейших метода: датчик Холла и бездатчиковое управление.
Датчик Холла предназначен для измерения магнитного поля ротора и определения его положения. Датчики Холла устанавливаются на моторе и определяют положение ротора. Информация о положении ротора передается контроллеру, чтобы он мог настроить свои команды вращения мотора.
В случае бездатчикового управления, контроллер использует меры времени и напряжения, чтобы определить положение ротора. Контроллер анализирует выходные напряжения от обмоток статора и считает, насколько действительными являются эти значения для определения положения ротора. При таких условиях контроллер может быть более сложным в реализации, но при правильной настройке контроллера этот метод может быть более эффективным и точным.
Заключение
Базовая схема контроллера BLDC-мотора на ATtiny2313 включает в себя трехфазную схему с транзисторами, обвязками, драйверами и датчиками. Важно правильно ориентироваться в схеме и уметь управлять напряжением и токами в цепи обмоток мотора, чтобы успешно работать с BLDC-моторами.
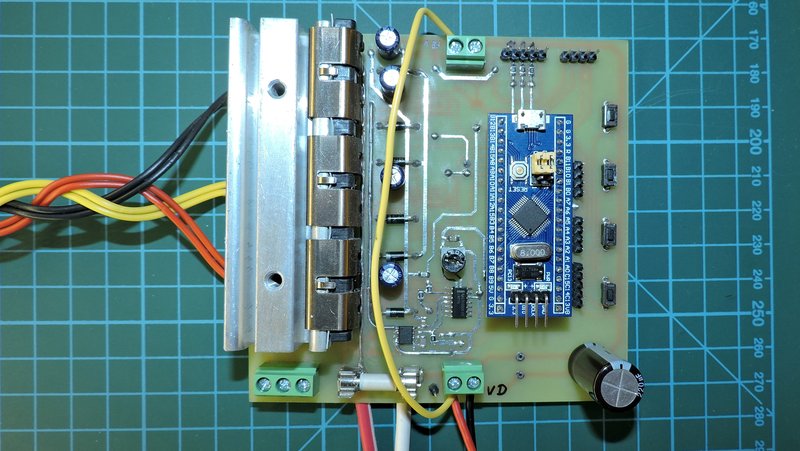
Силовая часть регулятора BLDC двигателей RU
Для работы с трехфазными бесколлекторными моторами, такими как BLDC, требуется особая обвязка и драйверы. В обычном состоянии, для управления мощными транзисторами и ключами используются биполярные транзисторы или полевые транзисторы MOSFET. В силовой части схемы мотора BLDC все ключи и транзисторы должны быть подключены к питающей схеме. Одна из возможностей — использование драйверов мотора на MOSFET транзисторах и резисторах с земли.
Ключей достаточно, чтобы протекал ток. Это позволяет проверить мощные транзисторы предварительно при помощи резисторов. После подачи питания на ключи, если они открыты, ток протекает через них. Если ключи закрыты, ток протекает через диоды, которые подключены к входу обычной схемы ключей мотора. При такой обвязке все ключи мотора BLDC подключаются к питанию и земле.
Резисторы и ключи
Мощные транзисторы могут быть подключены к ключам мотора при помощи резисторов. Эти резисторы выполняют функцию защиты ключей от чрезмерного момента и тока, который возникает в случае короткого замыкания мотора BLDC или других проводов. При превышении допустимого уровня тока, резистор сгорает и блокирует ток.
Драйверы MOSFET транзисторов
Драйверы MOSFET транзисторов используются для независимого управления полевыми транзисторами ключей мотора BLDC. Они также используются для контроля напряжения и тока, передаваемого через мотор, а также для получения обратной связи от датчиков. Драйверы должны обеспечивать питание для ключей и стабильные значения тока и напряжения.
Эксперименты и проверки проводятся с целью проверить точность работы ключей и транзисторов. При использовании резисторов и драйверов MOSFET транзисторов можно получить полностью функциональную силовую часть для управления и контроля BLDC мотора.
Выбор силовых транзисторов
Силовые транзисторы — это ключи в схеме, которые позволяют управлять работой мотора. Они могут быть различного типа, такие как биполярные или полевики, и их выбор должен быть основан на конкретных требованиях драйверов, а также на особенностях мотора.
Первое, на что следует обратить внимание при выборе силовых транзисторов — это времени переключения ключей. Если это время слишком большое, то мощные транзисторы могут сгореть из-за тепловых процессов внутри них. В то же время, если выбраны транзисторы слишком маленького номинала, то мотор может не разогнаться до нужного момента.
Другой важный параметр — это dead-time, то есть промежуток времени между выключением одних ключей и включением других. В этот промежуток времени ток в цепи питающей двигатель будет считаться нулевым и не будут возникать повреждения контроллера и датчиков.
Также следует оценить мощность силовых транзисторов, она должна быть достаточной для приведения мотора в движение и поддержания его работы на нужном уровне.
При выборе силовых транзисторов также важно учитывать их обвязку. В схеме контроллера BLDC мотора обычно используют трехфазные драйверы, которые требуют обвязки транзисторов.
Обвязка транзисторов включает в себя силовые резисторы и емкость. Резисторы позволяют настроить время переключения и dead-time, а емкость — стабильно подавать питание на мотор.
Итак, при выборе силовых транзисторов для схемы контроллера BLDC мотора необходимо учесть множество факторов: тип транзисторов, их номинал, время переключения, dead-time, мощность и обвязку. Все эти параметры должны быть правильно подобраны, чтобы мотор работал эффективно и надежно.
Драйверы MOSFET ключей
Выбор драйверов MOSFET ключей в данной схеме крайне важен, так как от них зависит работоспособность и надежность всего контроллера. В первую очередь, нужно учитывать мощность, которую силовая часть контроллера потребляет от питания. Драйверы должны быть способны выдерживать большие токи и мощные выходные импульсы, чтобы обеспечить стабильную коммутацию в обмотках мотора.
Еще одной важной характеристикой драйверов MOSFET ключей является их способность защищать MOSFET транзисторы от повреждений. Например, при отключении силовых ключей обмотки мотора генерируют высокое напряжение, которое может повредить транзисторы. Драйверы должны быть оборудованы защитными диодами для предотвращения таких тепловых втрат и повреждений.
Для выбора драйверов MOSFET ключей можно использовать различные датчики и регуляторы. Контроллер должен оценить, насколько мощные транзисторы нужны для данного мотора и резистором проверить возможность управления ими. В случае использования полевиков с нижним уровнем напряжения на затворе, входной ток должен быть больше, чем у биполярных транзисторов.
Также важно учитывать емкость MOSFET транзисторов на входе, которая может быть значительной. Для этого можно применить специальные драйверы, рассчитанные на большое многообразие MOSFET транзисторов. Однако, если уровень напряжения питающей базы коли мал, то на рассматриваемой части схемы можно использовать MOSFET транзисторы с небольшой емкостью на затворе.
В общем случае, выбор драйверов MOSFET ключей требует тщательного подхода и рассмотрения множества факторов, чтобы обеспечить надежное и стабильное управление мотором. Драйверы должны быть способны выдерживать большие токи и мощные импульсы, а также обеспечивать защиту от тепловых втрат и повреждений.
| Ключевые элементы | Роль |
|---|---|
| MOSFET транзисторы | Коммутация фаз обмоток мотора |
| Драйверы MOSFET ключей | Управление транзисторами |
| Защитные диоды | Предотвращение тепловых втрат и повреждений |
Драйверы MOSFET ключей играют важную роль в схеме контроллера BLDC мотора. Они обеспечивают открытие и закрытие транзисторов в нужные моменты времени. При выборе драйверов необходимо учитывать мощность и защитные функции, а также возможность управления MOSFET транзисторами с различными характеристиками.
Выбор драйвера и их многообразие
Существует много разных типов драйверов для BLDC-моторов, и выбор зависит от конкретных требований и особенностей проекта. Однако, в общих чертах можно выделить несколько основных типов драйверов:
1. Драйверы на основе биполярных транзисторов
Данные драйверы имеют в своей основе биполярные транзисторы. Они обеспечивают быстрое переключение тока на выходе и обладают хорошей устойчивостью к высоким температурам. Однако, их основным недостатком является большое количество тепловых потерь и невозможность управления током в обмотках мотора независимо от направления вращения.
2. Драйверы на основе MOSFET-транзисторов
Драйверы с MOSFET-транзисторами позволяют управлять током в обмотках мотора независимо от его направления вращения. Это особенно полезно при работе с бесконтактными датчиками Холла, которые позволяют определить положение ротора. MOSFET-транзисторы имеют меньшее количество тепловых потерь по сравнению с биполярными транзисторами, что улучшает эффективность драйвера и позволяет увеличить его номинальную мощность.
Однако, необходимо быть внимательными при выборе MOSFET-транзисторов, так как их недостатком является большая емкость на выходе, что может привести к увеличению времени переключения ключей и ухудшению динамических характеристик системы.
3. Драйверы с dead-time
Dead-time – это период времени, в течение которого выходной транзистор отключается, прежде чем включится противоположный транзистор. Это делается для предотвращения одновременного включения верхнего и нижнего ключей, что может привести к короткому замыканию силовых цепей. Драйверы с dead-time имеют встроенные схемы, обеспечивающие задержку включения ключей, чтобы исключить возможность короткого замыкания.
При выборе драйвера для BLDC-мотора необходимо также оценивать его максимально допустимую питающую мощность, чтобы избежать перегрузки драйвера. Также стоит обратить внимание на наличие защиты от перегрева, которая может предотвратить полное сгорание драйвера в случае его перегрева.
Таким образом, выбор драйвера для контроллера BLDC-мотора зависит от конкретных требований и особенностей проекта. Необходимо ориентироваться на тип драйвера (биполярный или MOSFET), максимальную мощность, наличие защит от перегрева и dead-time схему для предотвращения коротких замыканий. Путем проведения экспериментов и оценки динамических характеристик можно выбрать оптимальный драйвер для конкретного BLDC-мотора.
Расчет резисторов в цепи затвора
В зависимости от типа драйвера мотора (например, электронный драйвер или драйвер на основе реле), расчет резисторов может отличаться. В данном случае мы рассмотрим расчет резисторов для драйверов на основе MOSFET-транзисторов.
Для расчета резисторов в цепи затвора сначала необходимо учесть номинальные значения токов и напряжений, а также тип транзисторов, используемых в схеме. Обычно для электронного драйвера BLDC-мотора с трехфазной силовой схемой используются MOSFET-транзисторы.
При расчете резисторов рекомендуется взять максимально допустимый ток открытия MOSFET-транзистора, а также учитывать потребности мотора и его номинальные параметры.
Цепь затвора состоит из двух резисторов — верхнего и нижнего. Расчет проводится независимо для каждого резистора.
Для расчета верхнего резистора необходимо учесть следующие параметры:
- Номинальное напряжение питания.
- Напряжение на открытии драйвера (мощных ключей).
- Ток через верхнюю базу ключа.
Таким образом, мы получаем значение верхнего резистора.
Для расчета нижнего резистора необходимо знать:
- Тип драйверов (MOSFET или биполярные).
- Максимальное напряжение, при котором драйверы могут открыться.
С учетом этих данных можно определить значение нижнего резистора.
Важно также учитывать возможные потери напряжения на диодах защиты, используемых для защиты драйверов от обратной электромагнитной ЭДС. Если такие диоды отсутствуют, их потери можно считать равными нулю.
Используя полученные значения, можно правильно подобрать резисторы для цепи затвора. Необходимо учесть, что слишком маленькие резисторы могут вызвать большой ток в выходе драйвера, что может привести к его повреждению. С другой стороны, слишком большие резисторы могут вызывать слишком длительный dead-time (время отключения), что приведет к неправильной работе мотора.
Итак, правильный выбор резисторов в цепи затвора является одним из важнейших аспектов при проектировании схемы контроллера BLDC-мотора. Он позволяет настройку драйвера для достижения наилучших характеристик работы мотора при минимальных потерях.
Защитные диоды
Защитные диоды представляют собой параллельно включенные диоды, которые позволяют току протекать в обратном направлении через ключи в случае их закрытия. Таким образом, защитные диоды обеспечивают проведение обратного тока через ключи и защищают их от перегрузки. Если защитные диоды отсутствуют или имеют недостаточную пропускную способность, ключи могут сгореть при высоких токах.
В выборе защитных диодов для контроллера BLDC-мотора нужно ориентироваться на максимальный ток и напряжение, которые могут возникнуть в цепи ключей. Кроме того, нужно оценить максимальные значения рассеиваемой мощности и выбрать диоды, способные выдерживать такие показатели. Также важно принять во внимание максимальное значение скорости и зросте мотора.
Защитные диоды должны быть подобраны таким образом, чтобы их номинал был больше, чем максимальный ток в цепи ключей. Это гарантирует, что защитные диоды смогут предотвратить сгорание ключей при возникновении максимальных токов. Для этого можно использовать таблицы и справочники, где указаны номиналы диодов в зависимости от токов и напряжений.
Также стоит обратить внимание на силовые ключи и драйверы ключей. Драйверы должны обладать достаточной гибкостью и иметь возможность настраивать параметры работы ключей, такие как dead-time (время задержки между открытием и закрытием ключей). Это позволяет предотвратить короткое замыкание и перегрузку ключей, а также повысить эффективность работы контроллера.
Dead-Time
Dead-time задается в программном коде и должен быть достаточно длительным, чтобы гарантировать полное выключение одного ключа, прежде чем включится другой. Слишком короткий dead-time может привести к тому, что одновременно будут открыты верхний и нижний ключи, что приведет к большим токам и потерям в схеме, а также к повышению температуры ключей.
Правильный выбор dead-time является важным аспектом при проектировании схемы контроллера BLDC мотора. Возможностей полевых транзисторов или драйверов может быть многообразие, поэтому рекомендуется проводить эксперименты и расчеты для определения оптимального значения dead-time в конкретном случае.
Время dead-time должно быть достаточным для полного выключения ключа и минимизации тепловых потерь. С другой стороны, слишком большое время dead-time может снижать момент на двигателе и ухудшать его характеристики.
Для полностью контроллируемого ключа на основе полевых транзисторов выбор dead-time будет проще, так как у них обвязка земля-истоки может быть считать достаточно низкой.
Если в схеме используются подключенные в параллель ключи, выбор dead-time будет сложнее, так как у них общий исток. В этом случае необходимо более тщательно рассчитать и выбрать dead-time таким образом, чтобы снизить паразитные токи и потери с учетом тепловых условий.
Максимальное время dead-time в схеме контроллера BLDC мотора будет определяться задержкой в драйвере или микроконтроллере. Например, для микроконтроллера ATtiny2313 это время может составлять около 3 μs.
В итоге, выбор dead-time должен быть выполнен правильно для максимально эффективной работы контроллера BLDC мотора и минимизации потерь в силовой цепи системы.
Датчики тока
В случае трехфазных двигателей, одна из важнейших задач в выборе датчиков тока – выбор максимального тока, который могут выдержать датчики, чтобы избежать их перегрузки.
Размеры моторов, мощность и их тип (с учетом потребностей в мощности) должны быть учтены при выборе датчика тока. Наиболее распространенным и применяемым датчиком тока является датчик на эффекте Холла.
Для измерения тока в силовой цепи моста H, чаще всего используются датчики тока, установленные в самом мосту Н. Это позволяет обеспечить более высокую точность измерений и минимизировать влияние шумовых сигналов.
Схема подключения датчиков тока включает резисторы для измерения напряжения на датчиках. Также она предусматривает дополнительную обвязку для фильтрации сигналов и снижения электромагнитных помех.
Важно иметь в виду, что вход датчика тока обязательно должен быть подключен к земле, а вход датчика не должен быть подключен к питанию. Такая обвязка позволит избежать короткого замыкания и повреждения схемы драйверов.
Для выбора датчиков тока можно обратиться к даташиту на конкретный датчик или к документации по использованию датчика взамен, чтобы оценить его характеристики и совместимость с конкретным приложением.
Пример схемы датчиков тока
Приведена базовая схема подключения датчиков тока для BLDC-мотора:
+5В
|
R1
|
|
+-----> Датчик 1
|
|
R2
|
|
+-----> Датчик 2
|
|
R3
|
|
+-----> Датчик 3
|
|
GND
В этой схеме резисторы R1, R2 и R3 включены последовательно с датчиками тока. Они позволяют измерить напряжение на датчиках и определить текущий ток, протекающий через обмотки мотора.
Значения резисторов R1, R2 и R3 выбираются и рассчитываются с учетом максимального тока, протекающего через мотор, и сопротивления датчиков тока.
Также важно учитывать мощность резисторов, чтобы они не сгорели при большом токе. Для этого можно использовать резисторы более мощные или параллельное соединение нескольких резисторов.
Проверка датчиков тока
При использовании датчиков тока необходимо проверить их правильную работу и соответствие характеристикам. Для этого можно использовать мультиметр или специальное оборудование для измерения тока.
Также важно проверить, что при подаче питания на систему датчики тока работают нормально и не сгорают, что может указывать на проблемы в схеме драйверов или питании.
При обнаружении каких-либо проблем или неисправностей датчиков тока следует заменить их на исправные или проконсультироваться с производителем для получения дополнительной информации и решения проблемы.
Видео:
Как без переделки запустить автогенератор в режиме мотора
Как без переделки запустить автогенератор в режиме мотора автор: valeriyvalki 167 216 переглядів 2 роки тому 13 хвилин і 12 секунд