- Схема шагового двигателя STP 42D
- Как работает шаговый электродвигатель
- Что такое шаговый двигатель
- Преимущества и недостатки шагового электродвигателя
- Устройство и принцип работы
- Типы шаговых двигателей
- По конструкции ротора
- По виду обмоток
- Биполярный
- Подключение шагового двигателя
- Типичные схемы подключения ШД
- Управление шаговым двигателем
- Без контроллера
- С контроллером
- Популярные схемы управления ШД
- Простейший драйвер шагового двигателя своими руками
- Полезное видео
- Видео:
- ПОДКЛЮЧАЕМ ШАГОВЫЙ ДВИГАТЕЛЬ К ARDUINO [Уроки Ардуино #14]
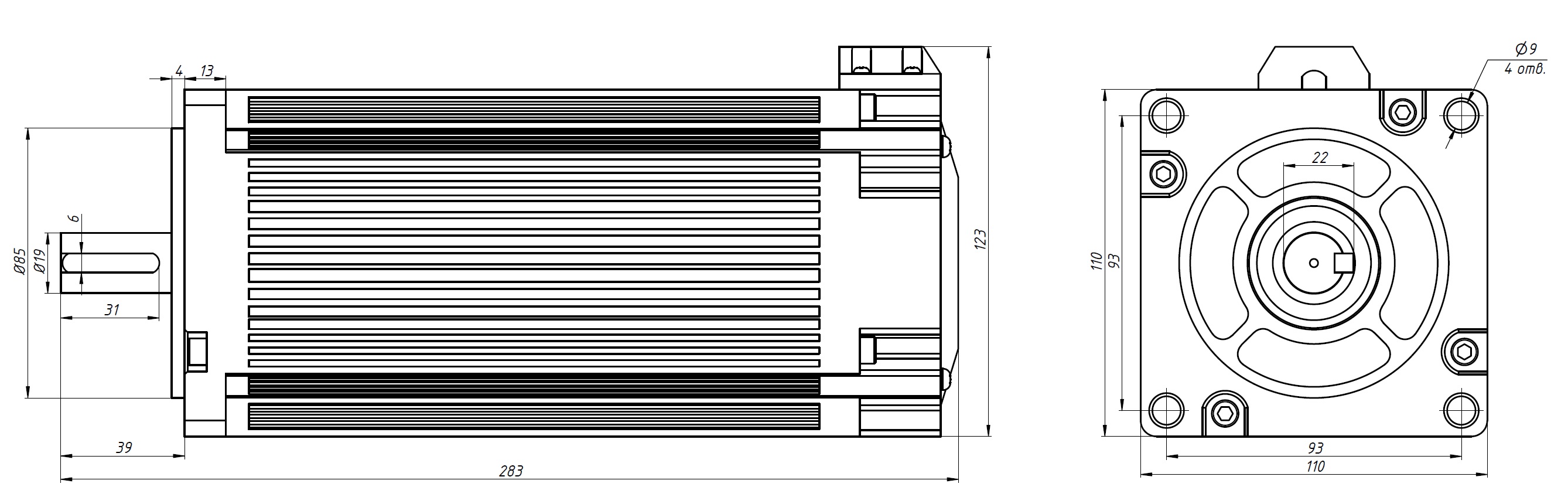
Схема шагового двигателя STP 42D

Шаговый двигатель STP 42D — устройство, которое обеспечивает вращение счетчиков на определенное число шагов. Он работает по принципу изменения магнитного поля благодаря индуктивности обмоток, что позволяет двигателю перемещаться на один шаг вперед или назад. Типичные шаги данного двигателя обычно равны 1.8 градуса, но в зависимости от конструкции шаг может отличаться.
Работа шагового двигателя STP 42D в фазе обратной подачи позволяет определить максимальное число шагов, которые можно совершить при полном вращении. Отдельные устройства, которые подключаются к такому двигателю, позволяют определить, на какую сторону повернулся вал.
Таким образом, шаговый двигатель STP 42D — это популярное устройство, применяемое в различных областях, где необходимо точное вращение. Он обеспечивает управление вращением счетчика в зависимости от необходимого числа шагов. Несмотря на некоторые недостатки, такие как стоимость и сложность подачи сигналов, данный вид электродвигателя широко применяется и является полезным в различных сферах работы и приложений.
Как работает шаговый электродвигатель
Управление шаговым электродвигателем осуществляется подачей импульсов тока на его обмотки. При каждом импульсе обмотка создает магнитное поле, которое взаимодействует с магнитным полем статора, вызывая вращение вала. Чем больше частота подачи импульсов, тем выше скорость вращения вала.
Остановки вращения вала шагового электродвигателя происходят за счет изменения последовательности подачи импульсов тока на обмотки. При подаче импульсов в обратном направлении второй обмотке, магнитное поле становится противоположным и останавливает вращение вала. Также, можно изменять скорость вращения вала шагового электродвигателя путем изменения частоты подачи импульсов.
Преимуществом шаговых электродвигателей является возможность точного позиционирования вала. Они могут работать без обратной связи и контроллера позиционирования, что делает их простыми в использовании. Электродвигатели также обладают высоким крутящим моментом и широким диапазоном скоростей.
К недостаткам шаговых электродвигателей относятся постоянное энергопотребление, даже если вал не вращается, и низкая эффективность в работе на высоких скоростях. Также, для определения положения вала и избегания ошибок в позиционировании требуется использовать датчики.
Конструкция шаговых электродвигателей может быть различной. Такой электродвигатель может быть однофазным или двухфазным, а также может иметь разное число обмоток. В зависимости от конструкции и количества обмоток, шаговый электродвигатель может иметь разные типы подключения и направления вращения.
Что такое шаговый двигатель
Преимущества шаговых двигателей в робототехнике заключаются в возможности применять их в различных типах нагрузки, при этом без потери параметров и функциональности. Недостатком шаговых двигателей является их отсутствие полного вращения вала двигателя. Однако этот недостаток в ряде случаев обеспечивает большее управление вращением и более полезное применение для конкретных задач.
Схемы подключения шаговых двигателей могут отличаться в зависимости от схемы управления и типа двигателя. Момент вращения шагового двигателя определить можно в виду его конструкции и количества обмоток. Полное вращение ротора обеспечивается благодаря подключению и управлению обмотками двигателя.
| Преимущества шаговых двигателей | Недостатки шаговых двигателей |
|---|---|
| Большая точность | Отсутствие полного вращения вала |
| Высокая надежность | Зависимость от шага |
| Широкий диапазон скоростей | Требуется шаговый контроллер для управления |
Преимущества и недостатки шагового электродвигателя
Шаговый электродвигатель, также известный как шаговый двигатель или ШД, представляет собой особый тип электродвигателя, в котором вращение ротора происходит с определенным углом в соответствии с подаваемыми электрическими импульсами. Этот тип двигателя обладает рядом преимуществ и недостатков.
Одним из основных преимуществ шагового двигателя является возможность точной и позиционной установки ротора. Благодаря такому свойству шагового двигателя, его можно использовать в различных устройствах, где требуется точное позиционирование, например в принтерах, робототехнике и других подобных устройствах.
Еще одним преимуществом шагового двигателя является простота управления и подключения. Для управления таким двигателем нужен только специализированный контроллер, который подает инструкции на вращение ротора.
Кроме того, шаговые электродвигатели имеют высокий крутящий момент, что позволяет использовать их в задачах, где требуется большая сила вращения (например, в прессах или конвейерах).
Среди недостатков шаговых двигателей можно отметить высокую стоимость по сравнению с другими типами электродвигателей. Это связано с использованием специальных драйверов и контроллеров для управления такими двигателями.
Кроме того, шаговый двигатель может работать только в определенных режимах вращения и не обеспечивает плавное и непрерывное движение. Вместо этого, двигатель передвигается на один шаг, что может вызывать вибрацию или даже останавливаться полностью, если не получает необходимые электрические импульсы.
Также, обмотки шаговых электродвигателей обладают индуктивностью, что может создавать нежелательные эффекты в виде электромагнитных помех и перегревов.
Видео смотрите в предыдущих счетах!
Устройство и принцип работы
Статор представляет собой магнитную конструкцию с обмоткой, которая создает магнитное поле. Ротор — это ось с намагниченными сердечниками. Подача питания на разные фазы обмотки статора позволяет создавать магнитные поля разной полярности, что приводит к вращению ротора.
Подключение шагового двигателя осуществляется с помощью контроллера или драйвера, который управляет подачей нужных импульсов питания на обмотки статора. Контроллер или драйвер обеспечивает полную связь между устройством, управляющим двигателем, и самим двигателем. Это позволяет эффективно контролировать вращение и остановку двигателя.
Шаговые двигатели могут быть разных типов и конструкций. Основные типы шаговых двигателей включают одношаговые, двухшаговые и многошаговые. Каждый тип имеет свои особенности и применяется в разных сферах. Например, одношаговые двигатели характеризуются большим числом шагов на оборот, что обеспечивает более точное позиционирование, в то время как двухшаговые двигатели обеспечивают большую мощность.
Принцип работы шагового двигателя основан на использовании электромагнитного поля для передачи вращательного движения на вал. Когда подается последовательность импульсов питания на обмотки статора, меняющаяся полярность создает вращение ротора. Поскольку каждый импульс питания соответствует одному шагу, шаговый двигатель может обеспечивать точное позиционирование и контролировать моменты остановки.
Одним из недостатков шаговых двигателей является то, что они могут иметь несколько позиций равновесия, в которых ротор может остановиться. Это может вызывать нестабильность в работе системы. Для более точного позиционирования может использоваться обратная связь путем добавления датчика положения.
Работа шагового двигателя подразумевает изменение фаз обмотки. Для этого используется специальная схема, которая называется Н-мостом. Н-мост представляет собой электронную схему, позволяющую осуществлять переключение направления и подачи питания на обмотки статора в нужной последовательности. Это гарантирует правильное вращение ротора в нужную сторону.
Типы шаговых двигателей
Шаговые двигатели могут быть двух типов – однофазные и биполярные. Однофазный шаговый двигатель имеет одну обмотку, а биполярный – две обмотки.
Конструкция шаговых двигателей может отличаться в зависимости от их типа. Например, у однофазного шагового двигателя ротор представляет собой магнитный полюс, который взаимодействует с магнитными полями статорной обмотки. Биполярный же шаговый двигатель имеет ротор, состоящий из двух полюсов.
Одним из типичных недостатков шаговых двигателей является момент остановки, который зависит от нагрузки на валу и скорости двигателя. Шаговый двигатель имеет большее максимальное крутящее момент при малых оборотах и меньшее – при больших оборотах.
Шаговые двигатели популярны в робототехнике, так как их можно точно управлять без обратной связи благодаря принципу работы.
Управление шаговыми двигателями может происходить таким образом, что ротор двигается в правильном направлении с выбранным шагом (шаг-по-шагу). Это достигается за счет соответствующих изменений напряжения на обмотках двигателя.
Конструктивно шаговый двигатель можно изменить таким образом, чтобы он стал многополюсным (4, 6, 8 полюсов и т.д.), поэтому шаговые двигатели могут применяться в различных устройствах с различными типами подачи питания, что влияет на стоимость устройства и его характеристики.
Один из популярных типов шаговых двигателей – шаговый двигатель STP 42D. В его схеме применяется двухфазная конструкция, в которой ротор состоит из 4 полюсов. Этот тип шагового двигателя позволяет достичь большей точности вращения и увеличить крутящий момент. Более того, благодаря удобной конструкции шагового двигателя STP 42D, его можно управлять напрямую с помощью контроллера.
- Типичные применения шаговых двигателей:
- Принтеры и сканеры
- Лазерные резаки и граверы
- Токарные станки и фрезерные станки
- Робототехнические системы
- Автоматические двери и шлагбаумы
По конструкции ротора
Внутри шагового двигателя находятся катушки, которые подключаются к контроллеру или драйверу по схеме последовательного соединения, что позволяет определить направление вращения ротора и его шагом. Такая схема подключения больше всего применяется в различных устройствах, требующих точного позиционирования, например, в робототехнике.
Кроме того, конструктивно шаговой двигатель может быть двух видов: с одношаговым и полным шагом. В случае одношагового шагового двигателя ротор имеет всего два положения — включение и остановка. При полном шаге ротор может иметь несколько промежуточных положений между включением и остановкой, что позволяет более плавно и точно управлять вращением вала двигателя.
Такое устройство ротора популярно из-за своих простейших принципов работы и возможности определить собой направление вращения. Кроме того, шаговые двигатели обладают некоторыми недостатками, такие как шаговый режим остановки и могут потерять шаги из-за неправильного питания или других факторов.
Видите, насколько много может скрыться за такой простой конструкцией ротора шагового двигателя! Зная все эти особенности, можно более точно определить, какой шаговый двигатель подойдет для конкретной задачи.
По виду обмоток
Шаговые двигатели, такие как ШД STP 42D, относятся к типу электродвигателей, работа которых базируется на принципе магнитных полюсов. Устройство такого двигателя позволяет осуществлять вращение ротора с заданным шагом, благодаря такой особенности как последовательное подключение соответствующих катушек обмоток двигателя.
По типам обмоток двигатели бывают двух основных видов: одношаговые (у которых шаг составляет 1.8 градуса) и двухшаговые (у которых шаг равен 0.9 градуса). Большее количество шагов обеспечивается путем изменения параметров двигателя, таких как скорость и направление вращения ротора.
Одним из преимуществ использования шагового двигателя является возможность позиционирования нагрузки с высокой точностью. Такое устройство позволяет с помощью контроллера управления двигателем перемещать нагрузку на заданное количество шагов в нужном направлении.
По сравнению с другими типами двигателей, например, с постоянной скоростью или переменной скоростью, шаговый двигатель обладает некоторыми преимуществами, такими как простота управления, высокая точность позиционирования и возможность использования обратной связи для улучшения качества работы.
Однако у шагового двигателя также есть некоторые недостатки. Например, он имеет ограниченную скорость вращения и может работать только с небольшой нагрузкой. Кроме того, для его работы необходимо постоянное подключение к питанию, что может привести к дополнительным затратам электроэнергии. Тем не менее, шаговые двигатели широко применяются в различных устройствах, где требуется высокая точность позиционирования и контроля работы двигателя.
Биполярный
В биполярном шаговом двигателе обмотки расположены таким образом, что магнитные полюса ротора изменяют свое направление без применения внешних магнитных полюсов. Положение ротора зависит также от положения фазы на валу. Видите, двигатель без применения внешних магнитных полюсов обеспечивается изменением направления электрического тока в каждой фазе обмотки.
Простейший принцип управления биполярным шаговым двигателем предполагает только вращение с определенным числом шагов. При подаче напряжения на соответствующую обмотку двигателя и последовательного изменения направления тока, получается вращение вала с определенным шагом. При этом изменение направления электрического тока в обмотках с противоположным направлением обеспечивается без участия руками.
Биполярные шаговые двигатели могут иметь различные типы обмоток, в зависимости от типа подачи тока. Виды обмоток могут быть двухфазными или однофазными, а также иметь различную индуктивность и расположение полюсов. Виду таких характеристик двигателя можно подбирать наиболее подходящий вариант для конкретных задач.
Одним из преимуществ биполярного шагового двигателя является низкая скорость вращения вала. Это связано с тем, что количество шагов двигателя в полном обороте значительно больше, чем у других типов шаговых двигателей. Поэтому, биполярные шаговые двигатели перед всеми прочими типами применяться для точного позиционирования в низких скоростях.
Подключение шагового двигателя
Одной из самых популярных схем подключения шаговых двигателей является схема «биполярный н-мост». В этой схеме каждая фаза двигателя подключается к н-мосту, что позволяет контролировать направление вращения и остановку двигателя.
Устройства, которые можно использовать для контроля работы шагового двигателя, называются контроллерами. Они определяют скорость вращения и ток, подаваемый на обмотки двигателя, что влияет на его полезную мощность и нагрузку. Стоимость контроллера зависит от его функционала и возможностей.
Крутящий момент шагового двигателя обеспечивается благодаря намагничивающим свойствам магнитных полюсов на роторе. Конструктивно, шаговые двигатели можно разделить на два основных типа: однообмоточные и двухобмоточные.
В случае однообмоточного двигателя, весь ток для вращения ротора проходит через одну обмотку, что позволяет узнать его положение всего по одной фазе. У двухобмоточного двигателя имеется две обмотки, и для определения положения ротора используется как фаза шага, так и фаза удержания.
Подключение шагового двигателя и его схема зависит от его конструкции и целей использования. Шаговые двигатели могут быть применены в различных устройствах благодаря своим особенностям. Низкие инерционные характеристики и возможность позиционирования с большей точностью в сравнении с другими типами двигателей делают их очень популярными.
Простейший способ подключения шагового двигателя заключается в подаче тока через одну фазу, чтобы создать магнитное поле и начать вращение ротора. Однако в этом случае достигается только низкая скорость вращения. Для получения более высокой скорости вращения двигателя применяются более сложные схемы, которые управляют подачей тока на обмотки с различной фазой и импульсами.
Подключение шагового двигателя может быть организовано таким образом, чтобы достичь большей точности, но в таких случаях требуется более сложная схема управления и контроллер, способный обеспечить точность позиционирования.
Таким образом, подключение шагового двигателя зависит от его конструкции, целей использования и требуемых характеристик. Его можно использовать в различных устройствах благодаря особенностям шагового двигателя, таким как высокая точность позиционирования и возможность работы при низких скоростях.
Типичные схемы подключения ШД
Другой распространенной схемой подключения ШД является схема с использованием н-моста. В этой схеме момент двигателя можно контролировать путем изменения подачи сигналов на катушки обмоток в зависимости от направления вращения и требуемого момента. При использовании н-моста для управления шаговым двигателем возможно получение большего момента, а также изменение направления вращения в процессе работы. Кроме того, данная схема позволяет реализовать обратную связь с двигателем и контролировать его скорость. Однако, стоимость подключения ШД по схеме с использованием н-моста может быть выше, чем при прямом подключении.
Также существуют и другие схемы подключения ШД, которые могут отличаться в зависимости от конструкции и требований устройства. Важно выбирать такую схему подключения, которая наилучшим образом соответствует поставленным задачам и требованиям. Все вышеперечисленные схемы имеют свои преимущества и недостатки, и выбор нужной схемы подключения должен основываться на требующихся параметрах работы двигателя и стороне, с которой он будет использоваться.
Управление шаговым двигателем
Управление шаговым двигателем происходит путем изменения фазы токов, соответствующих обмоткам. В типичной схеме подключения ШД используется последовательное соединение обмоток. Обмотки подключаются к контроллеру, а затем к соответствующим фазам ротора.
Определить положение ротора и магнитных полюсов можно по положению фазовой обмотки. Конструкция двигателя обеспечивает получение большего числа полюсов и обмоток для более точного управления и низких скоростей.
Недостатком такого устройства является непосредственное воздействие контроллера на обмотки двигателя. Контроллер определяет положение ротора и управляет фазовыми обмотками, что может привести к низкой скорости и недостаточной мощности.
Популярные виды шаговых двигателей включают шаговые моторы постоянного тока и шаговые моторы переменного тока. Обмотки могут быть индуктивными или с постоянной индуктивностью, в зависимости от типа двигателя.
Расположение обмоток и полюсов в ШД обеспечивает определенный шаг вращения. Каждый шаг соответствует определенному углу поворота ротора. Шаг двигателя можно рассчитать по формуле, которую вы видите в схеме шагового двигателя.
Управление шаговым двигателем может быть реализовано с помощью различных устройств, таких как простейший контроллер или более сложные системы управления. Скорость вращения ротора зависит от частоты входного сигнала и числа шагов двигателя.
Таким образом, управление шаговым двигателем осуществляется путем изменения фазовых соединений и управления обмотками. Это позволяет управлять скоростью и точностью двигателя, делая его полезным инструментом в различных приложениях.
Без контроллера
Шаговые двигатели STP 42D могут работать без использования контроллера. Для этого необходимо подключить их непосредственно к источнику питания и управлять напряжением на фазах. Без контроллера осуществляется прямой контроль параметров двигателя.
Видео по схеме подключения двигателя STP 42D без контроллера:
- Примененный двигатель — STP 42D
- Без контроллера
- Подключение фаз двигателя напрямую к источнику питания
- Зависимость вращения ротора от подачи напряжения на фазы
Благодаря такому подключению получается возможность управлять шагом вращения двигателя своими руками. При подаче напряжения на фазы двигателя в определенной последовательности, он начинает вращаться с определенной скоростью и шагом. Изменение параметров подключения фаз влияет на скорость и шаг вращения.
Популярные схемы подключения шаговых двигателей STP 42D без контроллера:
- Последовательное подключение фаз
- Попеременное подключение фаз
- Подключение фаз с изменением направления вращения
Такая схема позволяет работать без использования контроллера, что упрощает устройство и экономит затраты на управляющие устройства. Однако, без контроллера ограничены возможности точного позиционирования двигателя, так как отсутствует обратная связь и контроль изменения фаз двигателей. Индуктивность фаз и возможность изменения нагрузки также влияют на подачу напряжения и шаг вращения.
С контроллером
Для управления шаговыми двигателями часто применяются специальные контроллеры, которые обеспечивают связь между устройством управления и самим двигателем.
Контроллеры шаговых двигателей позволяют осуществлять точное управление скоростью и положением вращения мотора, поэтому они являются неотъемлемой частью системы автоматизации.
Типичные задачи, которые решаются с помощью контроллеров, включают в себя управление рабочим циклом двигателя, подачей питания на обмотки в определенной последовательности, обратной связи для контроля положения и скорости, а также обнаружение и предотвращение перегрева двигателя.
Контроллер устанавливается между источником питания и шаговым двигателем, и благодаря своим схемам и алгоритмам управления обеспечивает необходимые параметры работы двигателя.
Одним из преимуществ использования контроллеров является возможность управления несколькими шаговыми двигателями одновременно, что позволяет создавать сложные и многоосевые системы.
Контроллер обеспечивает управление работой мотора, а также защиту двигателя от перегрева и неправильной работы.
Стоит отметить, что контроллеры могут использоваться для управления различными типами шаговых двигателей, включая биполярные и униполярные.
Использование контроллера позволяет значительно упростить управление и устранить множество недостатков, связанных с безконтролируемым ручным управлением двигателем.
Обычно контроллеры обладают возможностью подключения через интерфейсы связи, такие как USB, RS485, Ethernet, что обеспечивает возможность удаленного управления и мониторинга работы системы.
Кроме того, существуют контроллеры, которые позволяют управлять шаговыми двигателями с помощью алгоритма PID, что позволяет достичь более точного позиционирования и управления скоростью вращения.
Использование контроллера позволяет достичь максимальной производительности и надежности шаговых двигателей и обеспечить их эффективную работу в различных областях применения.
Популярные схемы управления ШД
Управление шаговым двигателем (ШД) может осуществляться различными схемами, которые позволяют контролировать его вращение и позиционирование. Конструкция шагового двигателя включает в себя обмотки с различным количеством полюсов, что позволяет получать разные типы вращения и управлять скоростью и моментом двигателя.
Одним из популярных типов схем управления ШД является биполярный полного шага. Эта схема обеспечивает более высокую скорость и момент двигателя за счет использования двух обмоток. Однако стоимость такого устройства может быть выше из-за необходимости использования дополнительного контроллера.
Еще одним популярным типом схемы является однообмоточный полного шага. В этой схеме обмотки своими руками располагаются так, что достигается полная подача тока на одну обмотку в одно время, а затем на другую, что обеспечивает более низкие нагрузки на электродвигатель.
Кроме того, существуют и другие типы схем управления ШД, такие как биполярный полшага, однофазный и двухфазный режимы. Они обладают своими преимуществами и подходят для различных параметров и требований позиционирования.
Одним из недостатков ШД является отсутствие обратной связи. То есть, контроллер не может определить точное положение ротора. Это означает, что точность позиционирования будет зависеть от типа схемы управления и других параметров.
Полезное свойство шаговых двигателей заключается в том, что они могут останавливаться и принимать движение в любом направлении. Это обеспечивается за счет изменения подачи тока на обмотки двигателя.
| Тип схемы | Преимущества | Недостатки |
|---|---|---|
| Биполярный полного шага | — Высокая скорость и момент двигателя — Более точное позиционирование | — Высокая стоимость из-за использования дополнительного контроллера |
| Однообмоточный полного шага | — Более низкие нагрузки на электродвигатель — Более простая схема управления | — Менее точное позиционирование |
| Биполярный полшага | — Более гладкое вращение — Более точное позиционирование | — Более низкая скорость |
| Однофазный и двухфазный режимы | — Более низкая стоимость — Простота схемы управления | — Менее точное позиционирование |
Как видно из таблицы, различные схемы управления ШД имеют свои преимущества и недостатки. Выбор определенного типа схемы зависит от требуемого момента, скорости и точности позиционирования
Простейший драйвер шагового двигателя своими руками
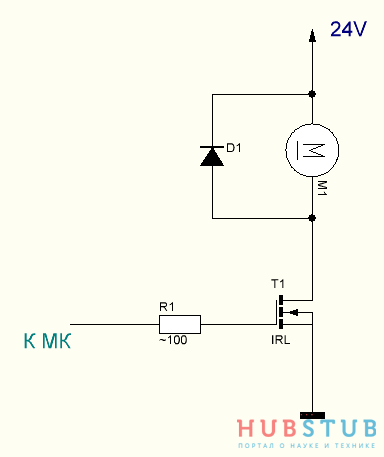
Простейшая схема драйвера шагового двигателя состоит из биполярного транзистора, счетчика, запасного резистора и конденсатора. В таком устройстве отсутствует обратная связь и контроль направления вращения, поэтому оно может использоваться только при простейших задачах, где направление вращения и остановки не требуются.
Последовательное подключение обмоток к драйверу позволяет определить полезную мощность двигателя и его работу в различных режимах. При этом полезная мощность может отличаться от тока, указанного в документации к двигателю.
Простейший драйвер шагового двигателя позволяет контролировать только скорость вращения. Для определения положения вала и координации двигателей в системе требуется более сложный драйвер с обратной связью и поддержкой программного управления.
На момент написания этой статьи популярным является применение драйверов шагового двигателя контроллером Arduino. Если у вас есть необходимость в подобном устройстве, рекомендуется обратиться к соответствующей документации и видео-урокам по данной теме.
- Простейший драйвер шагового двигателя можно создать своими руками
- Для правильной работы требуется подключение обмоток шагового двигателя к специальной схеме
- Простейший драйвер позволяет только контролировать скорость вращения
- Для определения положения вала и координации работы нескольких двигателей требуются более сложные драйверы
Если вы заинтересованы в создании простейшего драйвера шагового двигателя, поищите информацию о различных схемах и устройствах, которые могут подойти для вашей конкретной задачи.
Полезное видео
В этом полезном видео вы узнаете, как работает шаговый двигатель и какие у него есть особенности. Вы увидите схему работы такого двигателя и разберетесь в его конструкции и принципе управления.
Управление шаговым двигателем осуществляется специальным контроллером или драйвером, который подает ток на обмотки в определенной последовательности. Зависимо от этой последовательности, можно достичь разного вида вращения и позиционирования.
В видео вы увидите типичные схемы подключения шагового двигателя к контроллеру и различные способы управления. Также будут рассмотрены простейшие блок-схемы работы этих устройств и объяснены их преимущества и недостатки.
Посмотрев это полезное видео, вы узнаете также о том, как работает шаговый двигатель без контроллера или драйвера и в каких случаях это может быть полезно.
Так что если вы хотите узнать больше о шаговых двигателях и их работе, обязательно посмотрите это видео!
Видео:
ПОДКЛЮЧАЕМ ШАГОВЫЙ ДВИГАТЕЛЬ К ARDUINO [Уроки Ардуино #14]
ПОДКЛЮЧАЕМ ШАГОВЫЙ ДВИГАТЕЛЬ К ARDUINO [Уроки Ардуино #14] by Радиолюбитель TV 369,121 views 7 years ago 5 minutes, 19 seconds