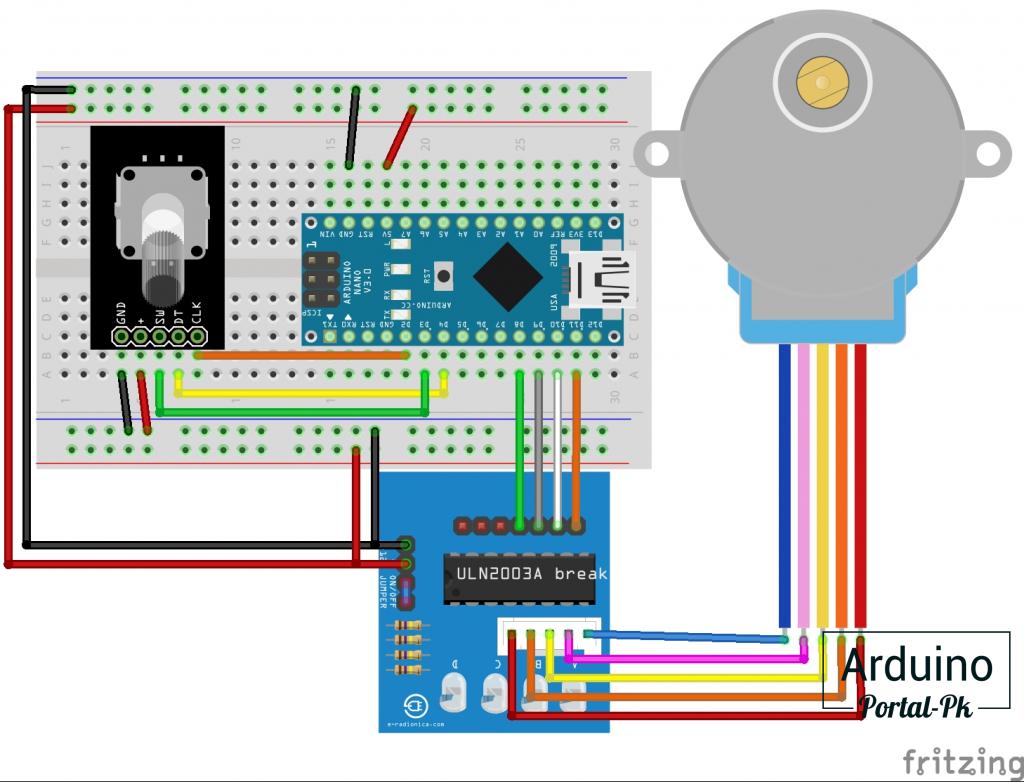
- Схема подключения оптического энкодера на Arduino для управления шаговым двигателем.
- Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
- Шаговый двигатель – принцип работы
- Где купить шаговый двигатель
- Драйвер для управления шаговым двигателем
- Драйвер шагового двигателя на базе L298N
- Подключение:
- Пример использования:
- Заключение:
- Драйвер шагового двигателя ULN2003
- Другие драйвера
- Подключение шагового двигателя к Ардуино
- Обзор основных моделей шаговых двигателей для ардуино
- Описание библиотеки для работы с шаговым двигателем
- Пример скетча для управления
- Заключение
- 21 Подключаем к Arduino Шаговый двигатель 28BYJ-48 на драйвере ULN2003
- Прямое подключение шагового двигателя 28BYJ-48 к Arduino
- Пример подключения шагового двигателя 28BYJ-48 5V с использованием драйвера ULN2003
- Пример управления шаговым двигателем 28BYJ-48 с помощью Энкодера
- Видео:
- Управление моторами с Arduino
Схема подключения оптического энкодера на Arduino для управления шаговым двигателем.

Оптический энкодер – это устройство, используемое для определения положения вращающегося объекта. В Arduino мире такие энкодеры чаще всего используются в связке с шаговыми двигателями для точного управления и обратной связи. Подключение оптического энкодера к шаговому двигателю с использованием Arduino позволяет значительно упростить процесс управления и повысить точность работы двигателя.
Для подключения оптического энкодера к Arduino и шаговому двигателю используются специальные библиотеки, которые значительно упрощают программирование и позволяют быстро настраивать работу энкодера и двигателя. Наиболее популярными библиотеками для работы с оптическим энкодером и шаговым двигателем являются AccelStepper, Encoder и Stepper.
Рассмотрим схему подключения оптического энкодера к шаговому двигателю на примере использования Arduino и драйвера ULN2003. Драйвер ULN2003 может быть использован в качестве базы для подключения шагового двигателя и оптического энкодера. Для подключения шагового двигателя используются контакты IN1, IN2, IN3 и IN4, а для подключения оптического энкодера – контакты CLK и DT. Принцип работы такой схемы подключения основан на подаче прямого сигнала шага на CLK и инвертированного сигнала шага на DT.
В схеме используются шаговые двигатели 28BYJ-48 или другие модели шаговых двигателей с биполярным управлением. Для управления шаговыми двигателями рекомендуется использовать драйвер L298N. Подключение шагового двигателя к драйверу L298N осуществляется путем подключения контактов IN1, IN2, IN3 и IN4 к контактам A1, A2, B1 и B2 соответственно.
В этом уроке мы рассмотрели схему подключения оптического энкодера к шаговому двигателю с использованием Arduino и драйвера ULN2003. Обзор и описание работы оптического энкодера и шагового двигателя позволяют лучше понять принципы их работы и использовать их в различных проектах. Необходимо отметить, что схема подключения и управления шаговыми двигателями может быть различной в зависимости от конкретной задачи и используемых моделей двигателей. Однако, использование энкодера позволяет значительно повысить точность и надежность работы шаговых двигателей.
Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
28BYJ-48 – это недорогой и компактный шаговый двигатель. Он имеет 4 фазы, 8 полюсов и шаговый угол равный 5.625°. Для его управления чаще всего используется драйвер ULN2003, который позволяет подключим двигатель к Ардуино и создать нужные сигналы для его работы.
Основным принципом работы шагового двигателя является изменение состояния электрических контактов в определенном порядке. Ардуино в этом процессе выступает в роли источника сигналов для изменения состояния контактов.
Для подключения шагового двигателя 28BYJ-48 к Ардуино нужно купить драйвер ULN2003. Это позволит организовать управление двигателем.
Подключение мотора к драйверу ULN2003 выглядит следующим образом:
- Шаговый двигатель подключается к контактам OUT1, OUT2, OUT3 и OUT4 на драйвере.
- Постоянное подаче напряжение 5Vсоединяется с контактами Vcc и GND на драйвере.
Для управления шаговыми двигателями с Ардуино чаще всего используют библиотеки Stepper или AccelStepper. Они позволяют устанавливать скорость вращения и контролировать позицию двигателя.
Для работы с драйвером ULN2003 и шаговым двигателем 28BYJ-48 можно использовать следующую схему подключения:
- Подключение контактов IN1, IN2, IN3 и IN4 драйвера ULN2003 к пинам на Ардуино для управления направлением движения двигателя.
- Подключение контакта 5V на Ардуино к контакту Vcc на драйвере для питания логической части.
- Подключение контакта GND на Ардуино к контакту GND на драйвере для общей земли.
- Подключение контактов OUT1, OUT2, OUT3 и OUT4 драйвера к фазам шагового двигателя.
Этот пример подключения позволяет управлять шаговым двигателем 28BYJ-48 с помощью Ардуино и драйвера ULN2003. Режимы работы двигателя, крутящий момент и другие настройки могут быть настроены с использованием соответствующей библиотеки.
Шаговый двигатель – принцип работы
Принцип работы шаговых двигателей основан на том, что они выполняют маленькие шаги поворота с помощью специальных электрических сигналов. Каждый шаг соответствует определенному углу поворота и обеспечивает точность перемещения.
Подключение шагового двигателя к Arduino чаще всего осуществляется на базе драйвера ULN2003 или 28BYJ-48. Эти драйверы позволяют подать сигналы шагового двигателя и управлять его работой с помощью Arduino.
В данном примере рассмотрим подключение шагового двигателя 28BYJ-48 к Arduino с использованием драйвера ULN2003. Для подключения энкодера к двигателю используются другие контакты и данная схема не будет рассматриваться в данном уроке.
Пример подключения шагового двигателя 28BYJ-48 к Arduino:
| Управление шаговым двигателем | Подключение шагового двигателя к Arduino |
|---|---|
| Контакт VCC (питание) | 5V (с постоянного источника питания) |
| Контакт GND (земля) | GND Arduino |
| Контакт IN1 | Пин 8 Arduino |
| Контакт IN2 | Пин 9 Arduino |
| Контакт IN3 | Пин 10 Arduino |
| Контакт IN4 | Пин 11 Arduino |
Драйвер ULN2003 позволяет управлять шаговым двигателем с помощью последовательного подключения 4 контактов IN1-IN4 к Arduino. Чередование сигналов в данных контактах позволяет крутить двигатель в одну или другую сторону.
При подаче сигналов в данной схеме согласно программе скетча Arduino, двигатель начинает вращаться в соответствии с установленной последовательностью сигналов.
Основной принцип работы шагового двигателя – это момент удержания. Подача сигнала на следующий контакт в последовательности позволяет двигателю удержать текущую позицию и не отклоняться. Это обеспечивает стабильность работы и точность позиционирования.
Шаговый двигатель с энкодером позволяет использовать его для обратной связи и уточнения позиции. Однако в данной схеме обзор работы с шаговым двигателем и энкодером не будет рассматриваться.
Где купить шаговый двигатель
Если вы ищете место, где можно купить шаговый двигатель, то следующие варианты могут быть полезны:
- Онлайн-магазины, такие как AliExpress, Amazon, eBay и другие, предлагают широкий выбор шаговых двигателей разных моделей и характеристик. Вы можете найти шаговые двигатели 28BYJ-48 и другие модели на базе различных драйверов, таких как ULN2003.
- Специализированные магазины электронных компонентов также предоставляют шаговые двигатели и драйверы для них. Здесь вы можете получить более подробную консультацию о выборе и подключении шагового двигателя к Arduino.
- Местные рынки электроники и магазины бытовой техники могут предложить шаговые двигатели для различных потребностей.
Перед покупкой обязательно изучите описание и характеристики шагового двигателя. Убедитесь, что выбранный вами двигатель подходит для ваших конкретных потребностей. Также обратите внимание на подключение и схему работы шагового двигателя в сочетании с выбранным драйвером. Это поможет вам правильно подключить и использовать шаговой двигатель в вашем проекте с использованием Arduino.
Итак, независимо от того, где вы решите приобрести шаговый двигатель, важно учесть его характеристики и правильно подключить его к Arduino для эффективного управления вашим проектом.
Драйвер для управления шаговым двигателем
Рассмотрим принцип работы драйвера для управления шаговым двигателем. Шаговые двигатели могут быть разных видов: биполярные и униполярные. В этом уроке мы будем использовать биполярные шаговые двигатели.
Для подключения шагового двигателя к Arduino используется специальный драйвер — L298N. Для управления двигателями используется сигнал step, который будет подавать плату Arduino вместе с направлением вращения двигателя.
Подключение шагового двигателя к L298N выглядит следующим образом:
- Подключите контакты двигателя к контактам L298N с помощью проводов. Обычно для этого используется 6 контактов, где 4 контакта являются контактами двигателя, а остальные 2 контакта — контакты питания.
- Присоедините контакты L298N к Arduino. Для этого используйте соответствующие контакты на плате Arduino.
- Установите библиотеку драйвера для работы с шаговыми двигателями. В Arduino IDE откройте менеджер библиотек, найдите библиотеку, скачайте ее и установите.
- Напишите скетч, который будет управлять шаговым двигателем с помощью L298N и Arduino. В этом скетче вы можете указать количество шагов и направление вращения двигателя.
Таким образом, мы рассмотрели принцип работы драйвера L298N для управления шаговыми двигателями. На практике этот драйвер чаще всего используется для управления двигателями моделей 28BYJ-48 с помощью Arduino.
Драйвер шагового двигателя на базе L298N
На Arduino часто используется драйвер шагового двигателя L298N для управления шаговыми двигателями. В этом уроке мы рассмотрим подключение и использование этого драйвера.
Драйвер L298N представляет собой мощный двухканальный драйвер, который может управлять двумя шаговыми двигателями или одним двигателем, имеющим две фазы. Он может работать с биполярными шаговыми двигателями и имеет высокую способность по подаче постоянного тока. Для управления шаговыми двигателями на базе L298N часто используются Arduino и библиотека Stepper.
В этом примере мы будем использовать Arduino Uno и двухканальный драйвер шагового двигателя L298N для управления шаговым двигателем.
Подключение:
Драйвер L298N имеет несколько контактов для подключения:
- IN1, IN2, IN3, IN4 — контакты для подключения сигналов управления шаговым двигателем;
- ENA и ENB — контакты для управления мощностью шагового двигателя;
- OUT1, OUT2, OUT3, OUT4 — контакты для подключения фаз шагового двигателя.
Для подключения Arduino к драйверу L298N используйте следующую схему:

Описание подключения:
- Подключите контакты IN1 и IN2 драйвера L298N к цифровым пинам 8 и 9 Arduino соответственно;
- Подключите контакты IN3 и IN4 драйвера L298N к цифровым пинам 10 и 11 Arduino соответственно;
- Подключите контакт ENA драйвера L298N к цифровому пину 5v Arduino;
- Подключите контакты OUT1 и OUT2 драйвера L298N к фазам шагового двигателя;
- Подключите контакт +12V драйвера L298N к источнику +12В;
- Подключите контакты VSS и GND драйвера L298N к земле Arduino;
- Подключите контакт VCC драйвера L298N к источнику питания Arduino.
Пример использования:
Для использования драйвера L298N в Arduino можно воспользоваться библиотекой Stepper. Эта библиотека предоставляет простые инструкции для управления шаговым двигателем.
Пример скетча для управления шаговым двигателем с использованием драйвера L298N:
#include <Stepper.h>
// Задайте количество шагов на оборот шагового двигателя
const int stepsPerRevolution = 200;
// Инициализируйте объект шагового двигателя
Stepper myStepper(stepsPerRevolution, 8, 10, 9, 11);
void setup() {
// Задайте скорость вращения шагового двигателя (в RPM)
myStepper.setSpeed(60);
}
void loop() {
// Поворачивайте шаговой двигатель в прямом направлении на 1 оборот
myStepper.step(stepsPerRevolution);
delay(1000);
// Поворачивайте шаговой двигатель в обратном направлении на 1 оборот
myStepper.step(-stepsPerRevolution);
delay(1000);
}В этом примере мы использовали библиотеку Stepper для создания объекта myStepper и установки скорости вращения шагового двигателя в 60 оборотов в минуту. Затем мы поворачиваем шаговой двигатель в прямом направлении на 1 оборот, ждем 1 секунду, а затем поворачиваем его в обратном направлении на 1 оборот и снова ждем 1 секунду.
Заключение:
На примере драйвера шагового двигателя на базе L298N мы рассмотрели его подключение к Arduino и использование с помощью библиотеки Stepper. Драйверы шаговых двигателей являются важной частью проектов, где требуется точное управление движением. Они широко используются в различных моделях, робототехнике и других областях.
Если вы хотите купить драйвер шагового двигателя на базе L298N или другие модели, то обратите внимание на его характеристики и возможности, чтобы выбрать подходящий вариант для вашего проекта.
Для более подробного описания и примеров подключения и использования других драйверов шаговых двигателей вы можете рассмотреть другие библиотеки и схемы подключения, такие как ULN2003 и использование прямого сигнала подачи шага.
Драйвер шагового двигателя ULN2003

Один из популярных драйверов для шаговых двигателей – ULN2003. Данный драйвер позволяет подключить до 7 шаговых двигателей и обеспечивает управление ими с помощью сигналов step и dir.
Для подключения шагового двигателя к драйверу ULN2003 необходимо следовать определенным подключениям. Основные контакты, используемые в подключении, это 4 контакта для подачи постоянного тока и 4 контакта для подачи сигналов управления.
Для управления шаговыми двигателями с помощью драйвера ULN2003 мы используем ардуино. В данном уроке мы рассмотрели подключение шагового двигателя 28BYJ-48 к драйверу ULN2003 с использованием ардуино.
Всего на данный момент существует несколько моделей шаговых двигателей. Однако наиболее популярными являются двигатели, которые имеют шаг в 5°, такие как 28BYJ-48.
Схема подключения шагового двигателя 28BYJ-48 к драйверу ULN2003 выглядит следующим образом:
Контакты двигателя:
- Контакт 1: Стрелка
- Контакт 2: 28BYJ-48
- Контакт 3: Управления
- Контакт 4: Шагового
Контакты драйвера ULN2003:
- Контакт 1: –
- Контакт 2: 5V
- Контакт 3: IN1
- Контакт 4: IN2
- Контакт 5: IN3
- Контакт 6: IN4
- Контакт 7: –
- Контакт 8: GND
Для программного управления шаговыми двигателями с использованием ардуино мы можем использовать специальную библиотеку, которая включает в себя описание основных функций для работы с драйвером ULN2003.
В этом уроке мы рассмотрели использование драйвера ULN2003 для управления шаговым двигателем с помощью сигналов step и dir, подключение двигателя 28BYJ-48 к ардуино и использование библиотеки для управления двигателями с помощью драйвера ULN2003.
Другие драйвера
Помимо L298N драйвера, существует множество других драйверов, которые могут быть использованы для управления шаговыми двигателями с помощью Arduino. Рассмотрим несколько из них:
- Драйвер A4988: Один из самых популярных драйверов для шаговых двигателей. Он может работать с двигателями на постоянном токе и биполярными шаговыми двигателями. Подключение A4988 к Arduino выглядит таким образом:
- Сигнал шага (Step) — подключается к контакту 2 на Arduino;
- Сигнал направления (Direction) — подключается к контакту 3 на Arduino;
- Питание (VCC) — подключается к контакту 5V на Arduino;
- Земля (GND) — подключается к GND на Arduino;
- Драйвер DRV8825: Этот драйвер также может управлять биполярными шаговыми двигателями и двигателями на постоянном токе. Схема подключения DRV8825 к Arduino аналогична подключению A4988.
- Драйвер TB6560: Этот драйвер часто используется в CNC-управлении и подходит для управления шаговыми двигателями. Контакты подключения TB6560 следующие:
- EN — включает/выключает драйвер;
- PUL+ / CW+ — контакты для подачи сигнала шага в прямом направлении;
- PUL- / CW- — контакты для подачи сигнала шага в обратном направлении;
- DIR+ — контакт для установки направления вперед;
- DIR- — контакт для установки направления назад;
- GND — заземление;
- VCC — питание 5V.
- Драйвер ULN2003: Этот драйвер может быть использован с некоторыми моделями шаговых двигателей, например, с 28BYJ-48. Подключение ULN2003 к Arduino происходит следующим образом:
- IN1, IN2, IN3, IN4 — контакты для управления подачей сигналов шага и направления;
- 5V — питание 5V;
- GND — заземление.
В зависимости от модели шагового двигателя и требований к его работе, вы можете выбрать подходящий драйвер и использовать его с Arduino. У каждого драйвера есть свои особенности подключения и настройки, поэтому перед использованием рекомендуется ознакомиться с документацией и примерами.
Подключение шагового двигателя к Ардуино
Для подключения шагового двигателя к Arduino нам понадобятся следующие компоненты:
- Arduino
- Шаговой двигатель (например, 28BYJ-48)
- Драйвер шагового двигателя (L298N или ULN2003)
- Энкодер (по желанию)
Вот как выглядит схема подключения шагового двигателя с использованием драйвера L298N:
| Шаговой двигатель | Драйвер L298N | Arduino |
|---|---|---|
| Контакт 1 (A) | OUT1 | — |
| Контакт 2 (B) | OUT2 | — |
| Контакт 3 (C) | OUT3 | — |
| Контакт 4 (D) | OUT4 | — |
| — | 5V | 5Vс Arduino |
| — | GND | GND с Arduino |
Если вы используете драйвер ULN2003, схема подключения будет выглядеть так:
| Шаговой двигатель | Драйвер ULN2003 | Arduino |
|---|---|---|
| Контакт 1 (A) | IN1 | — |
| Контакт 2 (B) | IN2 | — |
| Контакт 3 (C) | IN3 | — |
| Контакт 4 (D) | IN4 | — |
| — | 5V | 5Vс Arduino |
| — | GND | GND с Arduino |
При использовании драйвера L298N вам также понадобится подача сигналов для правильной работы мотора. Для этого используются шаговые сигнала (Step) и сигналы прямого или обратного вращения (DIR). В примере мы будем использовать режим полношагового движения.
Вот как выглядит скетч для подключения шагового двигателя к Arduino с использованием библиотеки Stepper:
#include <Stepper.h>
// Количество шагов на оборот шагового двигателя
const int STEPS_PER_REV = 2038;
// Пины подключения драйвера L298N к Arduino
const int IN1_PIN = 2;
const int IN2_PIN = 3;
const int IN3_PIN = 4;
const int IN4_PIN = 5;
// Создаем объект для управления двигателем
Stepper stepper(STEPS_PER_REV, IN1_PIN, IN3_PIN, IN2_PIN, IN4_PIN);
void setup() {
// Настройка скорости движения шагового двигателя (вращение в половину оборота в минуту)
stepper.setSpeed(30);
}
void loop() {
// Поворот двигателя на один оборот вперед
stepper.step(STEPS_PER_REV);
// Задержка в 2 секунды
delay(2000);
// Поворот двигателя на один оборот назад
stepper.step(-STEPS_PER_REV);
// Задержка в 2 секунды
delay(2000);
}В данном примере шаговой двигатель будет поворачиваться на один оборот вперед, а затем на один оборот назад, с задержкой в 2 секунды между поворотами.
Если вы хотите использовать энкодер для получения информации о положении вала двигателя, вы можете подключить его в соответствии с указаниями производителя и использовать соответствующую библиотеку для чтения данных с энкодера.
Обзор основных моделей шаговых двигателей для ардуино
Существует множество моделей и типов шаговых двигателей, каждый из которых имеет свои особенности и преимущества. Рассмотрим основные модели, которые чаще всего используются с Arduino:
- Униполярные шаговые двигатели: в этом типе используется простая схема подключения с помощью ULN2003 драйвера или аналогов. Эти двигатели могут быть питаемыми напряжением 5V и имеют меньшую стоимость по сравнению с другими моделями.
- Биполярные шаговые двигатели: этот тип двигателей имеет четыре провода, что позволяет использовать более эффективные схемы подключения и управления. Их часто используют с помощью специального драйвера шагового двигателя, такого как A4988 или DRV8825.
- Гибридные шаговые двигатели: это сочетание униполярного и биполярного двигателей. Они имеют более высокую производительность и точность позиционирования.
Режим управления шаговым двигателем с Arduino может быть осуществлен с помощью специальных библиотек, таких как Stepper или AccelStepper. С их помощью можно контролировать скорость, направление вращения и количество шагов.
Пример подключения и использования шагового двигателя с Arduino может выглядеть следующим образом:
- Подключим шаговой двигатель к драйверу шагового двигателя, таким как ULN2003.
- Свяжем драйвер с Arduino с помощью сигнальных проводов.
- Затем подключим драйвер к источнику питания, например, 5V или 12V.
- Напишем скетч для Arduino, в котором будут описаны необходимые сигналы и команды для управления двигателем.
- Запустим скетч на Arduino и наблюдаем, как двигатель вращается в заданных режимах и направлениях.
Шаговые двигатели с энкодером являются еще более эффективным решением для управления движением. Они позволяют обратную связь о текущей позиции двигателя, что делает его контроль более точным и надежным.
Описание библиотеки для работы с шаговым двигателем
Для работы с шаговыми двигателями на Arduino можно использовать библиотеку Stepper. Эта библиотека предоставляет удобный интерфейс для управления шаговыми двигателями разных моделей и типов подключения.
Основными моментами работы с шаговым двигателем являются:
- Подключение шагового двигателя к Arduino;
- Описание сигналов и контактов;
- Принцип работы шаговых двигателей;
- Выбор и подключение драйвера для шагового двигателя;
- Описание работы двигателя в режиме удержания;
- Примеры скетчей для работы с шаговыми двигателями.
Подключение шагового двигателя происходит с помощью драйвера, таким как L298N. Драйвер позволяет управлять шаговыми двигателями разных моделей и подключается к Arduino по прямой или биполярной схеме. В зависимости от модели шагового двигателя, подача сигнала шага может быть 5V или 12V.
Для работы с шаговыми двигателями на Arduino можно использовать библиотеку Stepper, которая позволяет управлять шаговыми двигателями разных моделей и типов подключения.
На примере шагового двигателя 28BYJ-48 можно рассмотреть принцип работы и подключение с использованием библиотеки Stepper. При подключении шагового двигателя к Arduino с помощью драйвера L298N, контакты A и B на драйвере соединяются с контактами A и B на шаговом двигателе.
Пример скетча для управления
Опишем подключение шагового двигателя к драйверу:
- Контакты моторов шагового двигателя A и B подключаем к выходам OUT1 и OUT2 драйвера соответственно.
- Контакт мотора шагового двигателя C и D подключаем к выходам OUT3 и OUT4 драйвера соответственно.
- Моментальный крутящий момент двигателя можно настроить, изменяя подачу постоянного сигнала на контакты ENABLE1 и ENABLE2 драйвера. В данном примере мы используем прямое подключение без удержания.
Опишем подключение энкодера к Arduino:
- Выходы энкодера OUT A и OUT B подключаем к цифровым пинам Arduino. В этом примере мы используем пины 2 и 3 для подключения.
Для работы с шаговыми двигателями и энкодерами в Arduino мы будем использовать библиотеку Stepper.h. С ее помощью можно управлять шаговыми двигателями различных моделей, включая 28BYJ-48.
Пример скетча для управления шаговым двигателем и энкодером:
#include <Stepper.h>
const int stepsPerRevolution = 2048;
Stepper myStepper(stepsPerRevolution, 2, 3);
void setup() {
myStepper.setSpeed(100);
}
void loop() {
myStepper.step(1);
}
В этом примере мы создаем объект myStepper типа Stepper с указанием количества шагов на оборот (stepsPerRevolution) и пинами, на которые подключены энкодер (в данном случае 2 и 3).
В функции setup() мы устанавливаем скорость двигателя с помощью функции setSpeed(). В данном случае скорость установлена на 100 шагов в минуту, вы можете изменить ее по своему усмотрению.
В функции loop() мы вызываем функцию step() для совершения одного шага двигателем. В данном случае мы совершаем шаг вперед на один шаг, вы можете изменить этот аргумент по своему усмотрению.
Таким образом, с помощью этого скетча вы сможете управлять шаговым двигателем с использованием оптического энкодера на Arduino.
Заключение
Мы рассмотрели схему подключения шагового двигателя с использованием оптического энкодера на базе Arduino. В этом обзоре мы подробно описали принцип работы и подключение шагового двигателя, а также использование оптического энкодера для контроля его вращения.
Подключение шаговых двигателей к Ардуино с помощью драйвера ULN2003 является одним из наиболее распространенных способов работы с этими устройствами. Часто они используются на уроках Arduino в школах, так как шаговые двигатели являются одними из основных компонентов в мире робототехники и автоматизации.
Подключение шагового двигателя с помощью ULN2003 и оптического энкодера позволяет управлять двигателем в прямом и постоянном режиме. Были рассмотрены все 21 подключение для шагового двигателя 28BYJ-48 и 4-х фазного драйвера ULN2003.
Для работы с шаговыми двигателями в Arduino мы использовали библиотеку Stepper, которая позволяет управлять двигателем с помощью шагового сигнала и задавать различные параметры, такие как скорость и направление вращения.
В этой статье мы рассмотрели только один пример подключения шагового двигателя и энкодера, но существует множество других схем и библиотек для работы с шаговыми двигателями и устройствами их контроля. С помощью Arduino и шаговых двигателей можно создавать самые разные устройства и механизмы – от простых роботов до сложных систем автоматизации.
Теперь, когда вы знаете основы работы с шаговыми двигателями и оптическими энкодерами, вы можете использовать эти знания для реализации своих проектов и экспериментов.
21 Подключаем к Arduino Шаговый двигатель 28BYJ-48 на драйвере ULN2003
В нашей схеме подключения мы использовали Arduino Uno, шаговый двигатель 28BYJ-48 и драйвер ULN2003. Для подключения мы использовали 4 пины Arduino (IN1, IN2, IN3, IN4) и подключили их к соответствующим пинам драйвера. Кроме того, подключили пин 5Vс Arduino к пину VCC драйвера и пин GND Arduino к пину GND драйвера.
В примере кода мы использовали библиотеку Stepper, которая предоставляет функции для управления шаговым двигателем. Мы указали количество шагов в одном обороте для нашего двигателя (32 шага) и установили пины IN1, IN2, IN3, IN4 в соответствии с нашей схемой подключения.
В режиме работы «Half-Step» каждый шаг двигателя выполняется в два этапа: сначала активируется одна фаза, а затем другая. Этот режим позволяет самым точным образом управлять двигателем. В скетче мы использовали функцию step() с аргументом 8, чтобы выполнить 8 шагов с половинным шагом.
Как мы рассмотрели, шаговые двигатели являются важными компонентами во многих проектах Arduino. Они чаще всего используются в робототехнике и других приложениях, где требуется точное позиционирование и управление движением. Для биполярного шагового двигателя часто используется драйвер ULN2003.
В этом обзоре мы рассмотрели пример подключения и использования шагового двигателя 28BYJ-48 на драйвере ULN2003 с помощью библиотеки Stepper. Всего мы подключили драйвер к Arduino с использованием всего 4 пинов. При подаче сигнала к пинам IN1, IN2, IN3, IN4 двигатель будет выполнять шаги в соответствии с заданным режимом и аргументом функции step().
Если вы хотите купить шаговой двигатель 28BYJ-48 и драйвер ULN2003, вы можете найти их в магазинах Arduino или у других поставщиков электронных компонентов.
В следующем примере мы рассмотрим подключение оптического энкодера Arduino и использование его для управления шаговым двигателем 28BYJ-48. Будут рассмотрены основные принципы работы энкодера, схема подключения, код и пример использования.
Прямое подключение шагового двигателя 28BYJ-48 к Arduino
Для управления шаговым двигателем 28BYJ-48 мы можем использовать Arduino и драйвер ULN2003. Двигатель 28BYJ-48 является 5-вольтовым двигателем с постоянным моментом, который имеет 4 фазы и 5 шагов на оборот.
Пример подключения двигателя 28BYJ-48 к Arduino и использования ULN2003 в качестве драйвера, можно привести следующим образом:
- Подключаем шаговой двигатель 28BYJ-48 к драйверу ULN2003. Для этого подключаем провода двигателя к соответствующим пинам драйвера, где A и D – красные провода, B и C – желтые провода, и «-» – черный провод.
- Подключаем Arduino к драйверу ULN2003. Подсоединяем провода от пинов IN1, IN2, IN3 и IN4 на драйвере к пинам Arduino. Например, IN1 – к пину 8, IN2 – к пину 9, IN3 – к пину 10 и IN4 – к пину 11.
- В Arduino IDE создаем новый скетч. Импортируем библиотеку Stepper. Создаем объект stepper, указав количество шагов на оборот (5) и пины IN1-IN4, которые мы используем для подключения к драйверу.
- В функции setup задаем скорость двигателя, используя метод setSpeed объекта stepper.
- В функции loop задаем последовательность шагов для двигателя, используя метод step объекта stepper. Например, для прямого вращения двигателя в режиме полного шага, можно использовать последовательность 1-2-3-4 и повторять ее.
Вот пример скетча:
#include <Stepper.h>
// Инициализация объекта Stepper с указанием количества шагов на оборот и пинов IN1-IN4
Stepper stepper(5, 8, 9, 10, 11);
void setup() {
// Задаем скорость двигателя (в данном случае 10 оборотов в минуту)
stepper.setSpeed(10);
}
void loop() {
// Последовательность шагов для прямого вращения двигателя
// Можно использовать другие последовательности для различных режимов работы
stepper.step(1);
stepper.step(2);
stepper.step(3);
stepper.step(4);
delay(1000); // Задержка между шагами (1 секунда)
}
В этом уроке мы рассмотрели прямое подключение шагового двигателя 28BYJ-48 к Arduino с использованием драйвера ULN2003. Эта схема подключения позволяет управлять двигателем с Arduino и использовать его в различных проектах.
Пример подключения шагового двигателя 28BYJ-48 5V с использованием драйвера ULN2003
Двигатель 28BYJ-48 является одним из наиболее распространенных шаговых двигателей, используемых в Arduino-проектах. Он имеет 4 фазы и может совершать один шаг с углом вращения 5,625 градуса. Двигатель осуществляет шаговое вращение и может быть использован для точной позиционирования в различных проектах.
Для подключения шагового двигателя 28BYJ-48 мы будем использовать драйвер ULN2003. Этот драйвер предназначен для подачи постоянного тока на фазы двигателя и управления его работой. Включение и выключение фаз происходит с использованием сигналов с Arduino.
Подключение шагового двигателя 28BYJ-48 5V к Arduino на базе схемы с драйвером ULN2003 выглядит следующим образом:
- Подключим пины IN1, IN2, IN3 и IN4 драйвера ULN2003 к соответствующим пинам Arduino (например, 8, 9, 10 и 11).
- Подключим пин VCC драйвера ULN2003 к пину 5V Arduino для подачи питания.
- Подключим пин GND драйвера ULN2003 к пину GND Arduino для общего заземления.
Для работы с шаговыми двигателями в Arduino могут быть использованы различные библиотеки, такие как AccelStepper, Stepper или AFMotor. В данном примере мы будем использовать библиотеку Stepper, которая является одной из основных.
Для начала работы с шаговым двигателем 28BYJ-48 вам необходимо подключить драйвер ULN2003 к Arduino и установить библиотеку Stepper. Затем вы можете использовать следующий скетч:
«`cpp
#include
// Шаговый двигатель 28BYJ-48
const int stepsPerRevolution = 2048; // Количество шагов на 1 оборот мотора
const int motorPin1 = 8; // Пин IN1 драйвера ULN2003
const int motorPin2 = 9; // Пин IN2 драйвера ULN2003
const int motorPin3 = 10; // Пин IN3 драйвера ULN2003
const int motorPin4 = 11; // Пин IN4 драйвера ULN2003
Stepper myStepper(stepsPerRevolution, motorPin1, motorPin2, motorPin3, motorPin4); // Создаем экземпляр класса Stepper
void setup() {
myStepper.setSpeed(5); // Устанавливаем скорость двигателя (вращение в шагах в секунду)
}
void loop() {
// Вращаем двигатель в одну сторону на 2048 шагов
myStepper.step(2048);
delay(1000); // Пауза 1 секунда
// Вращаем двигатель в другую сторону на 2048 шагов
myStepper.step(-2048);
delay(1000); // Пауза 1 секунда
}
В данном примере мы определяем количество шагов на 1 оборот мотора (stepsPerRevolution) и пины IN1, IN2, IN3 и IN4 драйвера ULN2003, к которым подключены соответствующие пины Arduino (motorPin1, motorPin2, motorPin3 и motorPin4).
В функции setup() мы устанавливаем скорость двигателя с помощью функции setSpeed().
В функции loop() мы выполняем вращение двигателя с помощью функции step(). Первый параметр функции step() указывает количество шагов для вращения, а отрицательное значение указывает вращение в обратную сторону. После вращения двигателя мы делаем паузу в 1 секунду с помощью функции delay().
Описанный пример позволяет подключить и использовать шаговой двигатель 28BYJ-48 5V с помощью драйвера ULN2003. Это простой и эффективный способ управления шаговым двигателем на базе Arduino.
В данном уроке мы рассмотрели принцип работы шаговых двигателей и их подключение к Arduino с использованием драйвера ULN2003. Кроме шагового двигателя 28BYJ-48, существуют и другие модели шаговых двигателей, которые могут быть подключены на базе аналогичных схем. Например, двигатели с использованием драйверов L298N или энкодера. Шаговые двигатели широко используются в различных проектах для точного позиционирования и перемещения объектов.
Если вы хотите купить шаговые двигатели, вы можете обратиться в специализированные магазины или найти их в интернете.
Заключение:
- Шаговые двигатели широко используются в Arduino-проектах для точного позиционирования и перемещения объектов.
- Для подключения шагового двигателя 28BYJ-48 5V используется драйвер ULN2003.
- Подключение осуществляется путем подачи сигналов на пины IN1, IN2, IN3 и IN4 драйвера ULN2003.
- Для работы с шаговыми двигателями в Arduino можно использовать различные библиотеки, такие как AccelStepper, Stepper или AFMotor.
- Описанный пример позволяет управлять шаговым двигателем 28BYJ-48 5V с помощью Arduino и драйвера ULN2003.
- Двигатель может вращаться в одну и другую сторону с использованием функции step() в скетче.
- Шаговые двигатели крутящего момента 28BYJ-48 являются популярным выбором для множества проектов на Arduino.
Пример управления шаговым двигателем 28BYJ-48 с помощью Энкодера
В данном примере рассмотрим подключение шагового двигателя 28BYJ-48 к Arduino с использованием оптического энкодера. Этот пример основан на использовании библиотеки Arduino Stepper.
Шаговый двигатель 28BYJ-48 является биполярным и имеет четыре контакта, которые подключаются к драйверу двигателя. Для управления шаговым двигателем 28BYJ-48 в этом примере будет использоваться драйвер ULN2003 или L298N.
Библиотека Arduino Stepper предоставляет несколько функций для управления шаговыми двигателями, включая функции для шагового перемещения и установки скорости вращения. В данном примере мы будем использовать функцию step, которая позволяет указать количество шагов и направление вращения.
Для подключения шагового двигателя 28BYJ-48 к Arduino с помощью энкодера, мы будем использовать следующую схему подключения:
- Подключим контакты шагового двигателя (IN1, IN2, IN3, IN4) к контактам драйвера ULN2003 или L298N.
- Подключим сигналы энкодера к Arduino. Сигнал «A» энкодера подключим к пину 2, а сигнал «B» энкодера — к пину 3 Arduino.
- Подключим пины GND и VCC энкодера к GND и 5V соответственно на Arduino.
В данном примере мы будем использовать базовый скетч Arduino для управления шаговым двигателем 28BYJ-48. Скетч будет представлять из себя цикл, в котором будет осуществляться перемещение двигателя в одном направлении с помощью энкодера.
Вот как выглядит код примера:
#include <Stepper.h>
const int stepsPerRevolution = 2048; // количество шагов на один оборот энкодера
const int encoderPinA = 2; // пин для сигнала "A" энкодера
const int encoderPinB = 3; // пин для сигнала "B" энкодера
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11); // инициализация объекта myStepper
void setup() {
pinMode(encoderPinA, INPUT);
pinMode(encoderPinB, INPUT);
myStepper.setSpeed(60); // скорость вращения двигателя
}
void loop() {
int encoderState = readEncoder();
if (encoderState == 1) {
myStepper.step(1); // двигаемся вперед на один шаг
}
}
int readEncoder() {
int encoderStateA = digitalRead(encoderPinA);
int encoderStateB = digitalRead(encoderPinB);
if (encoderStateA == HIGH && encoderStateB == LOW) {
return 1; // вращение вперед
}
return 0; // остальные состояния энкодера
}Шаговые моторы с энкодером все чаще используются в различных моделях роботов и промышленных устройств, где требуется точное и позиционное управление двигателем. Купить шаговые двигатели и драйверы для них можно в магазинах Arduino. Они позволяют быть аргументом для различных проектов с управлением шаговых двигателей на базе Arduino.
Видео:
Управление моторами с Arduino
Управление моторами с Arduino by Заметки Ардуинщика 417,214 views 3 years ago 15 minutes