- Особенности конструкции двигателей постоянного тока
- Принцип действия двигателя постоянного тока
- Особенности и устройство ДПТ
- История изобретения
- Конструкция двигателя
- Принцип действия и использование
- Настройка скорости
- Современное применение
- Электродвигатели постоянного тока: устройство, работа, виды
- Двигатель постоянного тока: Схемы соединения и характеристики ДПТ
- Конструкция ДПТ
- Пуск двигателя постоянного тока
- Регулирование скорости вращения
- Трёхфазный бесколлекторный электродвигатель постоянного тока
- Устройство электродвигателя
- Классификация МПТ по способу питания обмоток индуктора и якоря
- С независимым возбуждением
- С параллельным возбуждением
- С последовательным возбуждением
- С параллельно-последовательным смешанным возбуждением
- Плюсы – минусы
- Подключение к однофазным и трехфазным источникам питания
- Современное применение и перспективы
- Принцип работы
- Классификация
- Принцип преобразования энергии
- Виды двигателей и их устройство
- Асинхронные
- Синхронные
- Бесколлекторный электродвигатель постоянного тока: Общие сведения и устройство прибора
- Статор
- Ротор
- Система управления
- Общие технические характеристики электродвигателей постоянного тока П51 П52
- Условные обозначения двигателей постоянного тока серии П
- Габаритные и присоединительные размеры двигателей постоянного тока П51 П52 ПБ51 ПБ52
- Видео:
- Эпизод 149 — Человек за бортом! Будущее восстановления наших лодок #boatrestoration
Особенности конструкции двигателей постоянного тока

Двигатели постоянного тока являются одними из наиболее распространенных и широко используемых в электротехническом оборудовании. Их преимущества включают удобное регулирование скорости и обеспечение высоких силовых показателей, что позволяет использовать электрическую энергию наиболее эффективно.
Основными элементами двигателя постоянного тока являются якорь и обмотки, которые представляют собой токопроводящую цепь. В зависимости от технических характеристик и требуемой работы, количество обмоток может быть различным. Применение инвертора позволяет осуществить регулирование скорости и момента двигателя с помощью модуляции полей, что является одним из ключевых способов управления электродвигателем.
Таковы конструктивные особенности двигателей постоянного тока. Важными элементами являются также сердечник, контакты и присоединительные пазы. Использование параллельно-последовательного подключения обмоток позволяет достичь нужной скорости и момента двигателя.
При эксплуатации двигателей постоянного тока необходимо учитывать их тепловые характеристики. Внешние источники, а также сама техника, могут влиять на температуру двигателей, поэтому следует контролировать и поддерживать оптимальный режим работы. Более того, движение и регулирование скоростью двигателей влияют на их силовые показатели, поэтому требуется правильная настройка и подключение.
Принцип действия двигателя постоянного тока
Основной принцип работы ДПТ основывается на взаимодействии электрической и магнитной энергии. Двигатель состоит из статора и ротора. Статор представляет собой обмотку или несколько обмоток, подключенных параллельно или последовательно к источнику питания. Ротор — это вращающаяся часть, на которой насажена обмотка или намотаны провода, создающие магнитные поля.
При подаче напряжения на обмотки статора возникает магнитное поле. При включении пускового устройства или системы питания происходит взаимодействие этого магнитного поля со смешанным (параллельно-последовательным) полем ротора, создавая момент силы, который приводит к вращению ротора и, следовательно, к движению электродвигателя.
Для поддержания вращения ротора и уровня энергии необходимо постоянное воздействие внешних систем или генераторов электродвижущей силы (ЭДС) на обмотки ротора. Это достигается путем подсоединения обмоток ротора параллельно или последовательно с обмотками статора.
Система устройств и драйверов контролирует параметры двигателя, такие как скорость вращения и напряжение питания, а также качество и время пуска. Благодаря своей конструкции ДПТ обладает высокими габаритными и грузоподъемными характеристиками.
Обмотки статора и ротора ДПТ называются электродвигательными обмотками. В зависимости от условий работы и видов электродвижущей силы могут быть специально сконструированы различные типы обмоток, такие как обмотки постоянного возбуждения, обмотки с возбуждением от внешних полей или обмотки с самовозбуждением.
История развития ДПТ связана с усовершенствованием конструкции и параметров электродвигателей. Сегодня электродвигатели постоянного тока широко применяются в различных отраслях промышленности благодаря своей надежности и регулируемой скорости вращения.
Особенности и устройство ДПТ
На самом деле, ДПТ представляют собой модуляции электрических действий микроконтроллера или внешних силовых драйверов. Принцип работы ДПТ основан на действии магнитного поля воздействия на ротор, который насажен на вал. Этот ротор может быть как бесколлекторным, так и коллекторным.
Для понимания особенностей и устройства ДПТ необходимо в первую очередь разобраться в устройстве статора, ротора и контакты присоединительные между ними. Как правило, ДПТ имеют трёхфазное возбуждение, и все фазы подключены через преобразования напряжения к одной сети. Особенностью ДПТ является также то, что статор может быть как асинхронным, так и синхронным.
Более того, устройство ДПТ может представлять собой как простые, так и сложные по своему устройству двигатели. Простые ДПТ работают от постоянного напряжения питания и могут иметь только два контакта: «+» и «-«. Сложные ДПТ, называемые также ДПТ питания п51, имеют более сложную схему подключения и контактов – это связано с созданием электрической схемы запуска и остановки движения ротора.
История изобретения
История изобретения двигателей постоянного тока насчитывает много лет развития и усовершенствования. Одним из первых, кто провел исследования в этой области, был американский ученый Майкл Фарадей. Он назвал предшественником таких двигателей простое устройство, которое работало на основе принципа электромагнитного влияния.
В 1831 году Фарадей опроверг свою теорию о постоянном воздействии магнитного поля на проводники. Были введены понятия о положительных и отрицательных зарядах – условные обозначения для описания движения заряженных частиц в проводах.
Достигнув таких успехов, ученые поняли, что можно создать устройства, которые будут использовать электромагнитное поле для генерации механической энергии. В дальнейшем появились первые электродвигатели, магнитная обмотка которых состояла из одной фазы переменного тока.
Классификация электрических двигателей позволила разделить их на две группы: постоянного и переменного тока. К двигателям постоянного тока относятся такие устройства, как ПБ51 и П52, которые чаще всего используются в промышленности для работы в тяжелых условиях.
Постоянный токовый двигатель состоит из статора и ротора. Статор представляет собой магнитную обмотку с проводниками и имеет две фазы питания – пусковую и контрольную, которые используются для настройки параметров двигателя.
Ротор, в свою очередь, представляет собой шестерни, которые вращаются под воздействием магнитного поля статора. При подключении статора к внешнему источнику питания появляется электрическое поле, которое создает момент вращения.
Однако, у постоянного токового двигателя есть свои минусы. Во-первых, он имеет большой размер и вес, в отличие от трехфазных асинхронных двигателей. Во-вторых, его скорость вращения не регулируется, так как смешанным способом можно изменить только напряжение на обмотке ротора.
Работа постоянного токового двигателя основывается на короткозамкнутом воздействии магнитной энергии на проводники обмотки ротора. Эту функцию выполняет контакт между статором и ротором.
В настоящее время с развитием технологий и появлением специально разработанных инверторов стало возможным изменять скорость вращения двигателя постоянного тока путем изменения частоты и напряжения питания.
В результате можно сказать, что история изобретения двигателей постоянного тока – это история постоянного совершенствования и расширения их функциональных возможностей.
Конструкция двигателя
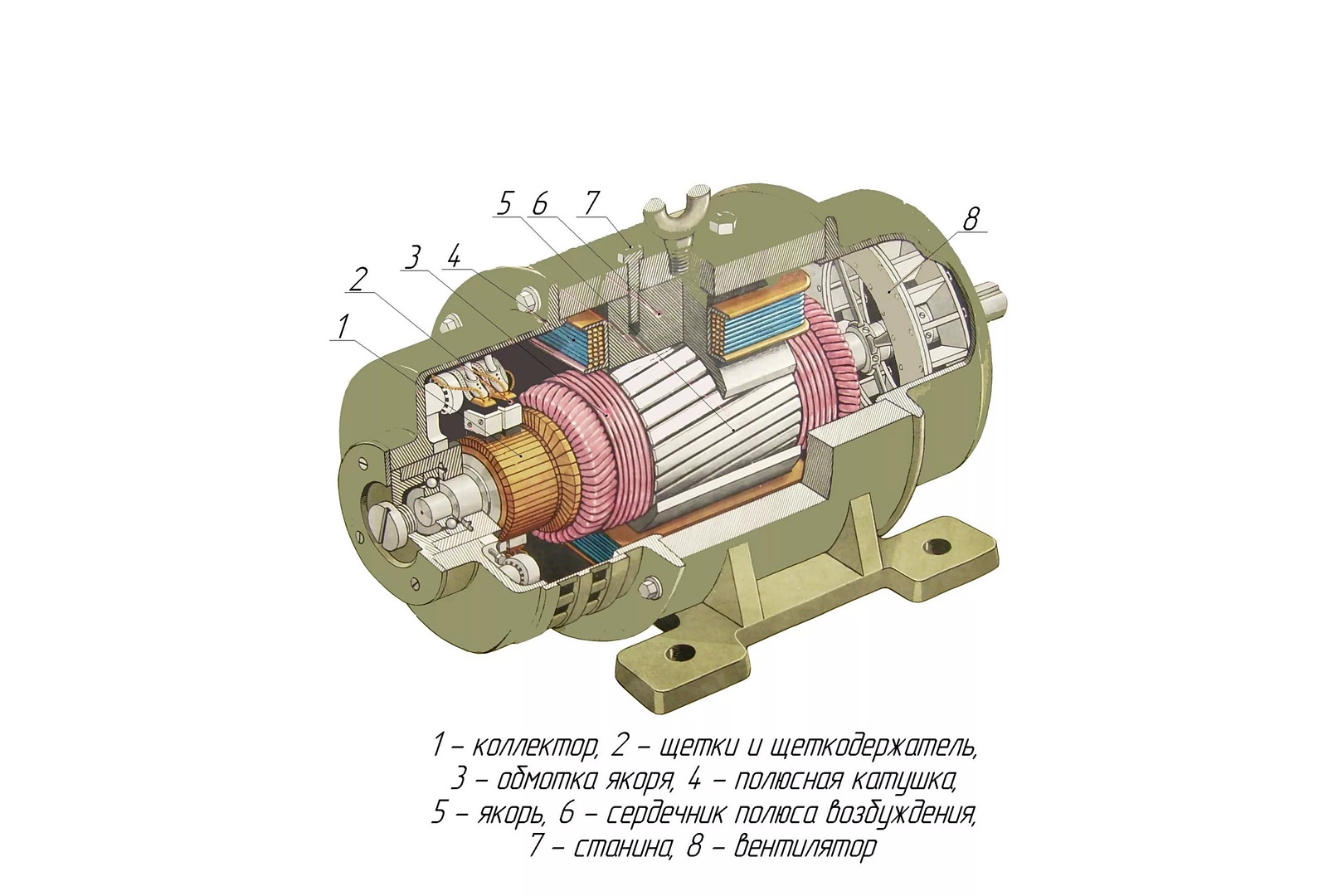
Электродвигатели постоянного тока состоят из нескольких основных компонентов. Основными компонентами являются якорь и обмотка возбуждения, которые размещены на сердечнике. Также включены присоединительные проводники для питания и устройства для создания обратной связи.
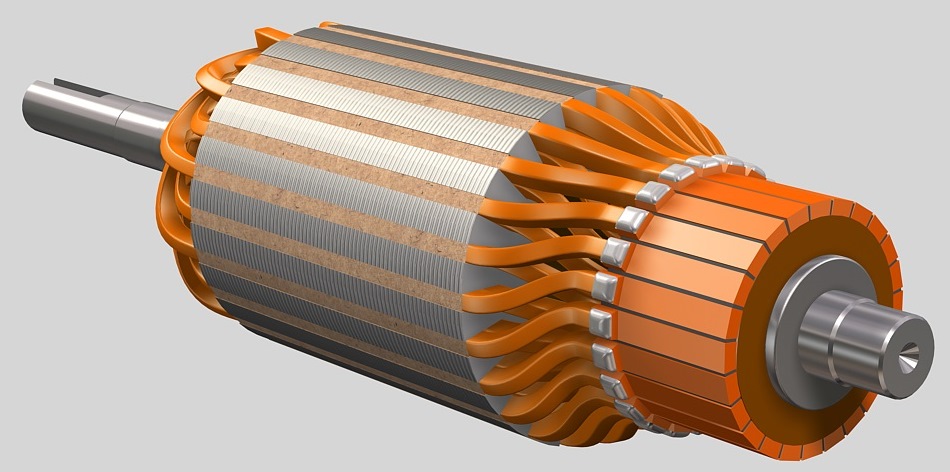
Якорь – это вращающаяся часть двигателя и осуществляет преобразование электрической энергии в механическую. Он состоит из обмотки якоря и магнитного сердечника. Обмотка якоря располагается на сердечнике и включает внешние и внутренние обмотки, которые создают магнитное поле. Магнитная сила становится генерируемым полем, которое создает вращение якоря.
Обмотка возбуждения служит для создания магнитного поля, необходимого для движения якоря. Она состоит из нескольких обмоток, которые располагаются на сердечнике. Для управления магнитным полем используется специальное устройство, например, инвертор или приборы схемы ПБ51 или ПБ52.
| Тип двигателя | Преимущества | Минусы |
|---|---|---|
| Постоянного тока | — Высокая точность управления скоростью | — Более сложная конструкция |
| Трехфазные асинхронные | — Простота конструкции | — Низкая точность управления скоростью |
Конструкция электродвигателя постоянного тока также зависит от его характеристик и условий применения. Например, возможны варианты с различным числом полюсов, а также с различной мощностью и напряжением питания.
Двигатели постоянного тока имеют высокую точность управления скоростью благодаря возможности изменять силу тока, проходящего через якорь. Однако, в сравнении с трехфазными асинхронными двигателями, они имеют более сложную конструкцию и требуют использования специальных устройств для управления.
В зависимости от целей применения, электродвигатели постоянного тока могут иметь различные рабочие характеристики. Например, в промышленности широко используются двигатели с регулируемой скоростью и показателями эффективности выше, чем у других типов двигателей.
Принцип действия и использование
Фазный принцип действия двигателей постоянного тока основан на использовании конструкции с независимыми электрическими полями, генерируемыми ротором и статором. История электродвигателей постоянного тока начинается с применением коммутатора, который позволял управлять движением ротора через изменение подключения к источникам питания.
Принцип действия двигателя постоянного тока заключается в взаимодействии между ротором и полями статора. Двигатель имеет две основные части — статор и ротор. Статор представляет собой недвижущую обмотку, а ротор — вращающуюся часть. В магнитном поле статора ротор начинает вращаться под воздействием токопроводящей части.
Для обеспечения движения вряд ли хватило бы только подключения двигателей постоянного тока к сети переменного тока 220 В. Поэтому для питания используются специально разработанные блоки постоянного тока, такие как БДКП.
Применение двигателей постоянного тока очень разнообразно. Их регулирование и настройка осуществляется с помощью инвертора. Регулировка характеристик двигателей осуществляется путем изменения частоты, а также положения ротора.
Единственной сложностью при использовании электродвигателей постоянного тока может быть необходимость в подключении генератора для пуска электродвигателя. Кроме того, для регулирования и контроля движения могут быть использованы специальные приборы.
| Были разработаны разные виды двигателей постоянного тока: | • Смешанным магнитным полем; | • Петля управления; | • Трёхфазный статор; |
| Они представляют собой различные конструкции, применяемые в зависимости от требуемых характеристик двигателя. |
Настройка скорости
Настройка скорости бесколлекторного двигателя постоянного тока осуществляется за счет регулирования тока, подводимого к мотору. Очень часто в качестве регулятора скорости используются сопротивления, которые могут быть присоединены параллельно-последовательным или независимым способом к принципу работы двигателя. Также можно использовать коммутатор сети оборудования для настройки скорости.
Бесколлекторные двигатели постоянного тока имеют трехфазную статорную обмотку и однофазный ротор, а также специальный коммутатор или коммуникационные элементы, которые являются основой работы двигателя. Одной из особенностей бесколлекторного двигателя является возможность регулирования скорости при помощи изменения тока, подводимого к мотору.
Настройка скорости двигателя осуществляется путем изменения тока, которое осуществляется с помощью уровня зарядов бдкп. Применение различных видов зарядов позволяет изменять скорость работы двигателя. Также можно использовать специальные преобразователи, которые позволяют регулировать скорость двигателя в широком диапазоне при различных температурах и нагрузках.
Бесколлекторные двигатели постоянного тока вырабатываются различными производителями и имеют разную классификацию. Некоторые моторы имеют параллельно-последовательные обмотки, которые позволяют достичь определенной гибкости в настройке скорости работы двигателя. Другие модели моторов имеют одну обмотку, которая может быть настроена на определенные условные скорости работы.
Настройка скорости бесколлекторных двигателей постоянного тока с помощью регулирования тока является одним из самых распространенных методов управления скоростью мотора. Они часто применяются в различных областях, таких как промышленность, автоматизация, робототехника и т.д.
Современное применение
Двигатели постоянного тока широко применяются в современных технологиях и промышленности, благодаря своим уникальным характеристикам. Они крайне эффективны в передаче энергии и обладают высокими показателями момента силы. С их помощью можно регулировать скорость вращения, а также создавать различные режимы работы, благодаря использованию смешанных токовых схем.
Одним из основных преимуществ двигателей постоянного тока является возможность регулирования скорости работы. Это осуществляется путем изменения подключения обмоток и применения различных схем регулирования, таких как параллельное и последовательное соединение обмоток. Таким образом, можно добиться нужной скорости работы и точно контролировать эффект регулируемого возбуждения.
Современные двигатели постоянного тока позволяют создавать бесколлекторные системы, которые обеспечивают непрерывную работу без необходимости использования щеток и переходных контактов. Такие двигатели отличаются высокой надежностью и долговечностью, а также обладают более компактными размерами и меньшими потерями энергии. Бесколлекторные двигатели позволяют за счет эффективной работы и меньшего воздействия на окружающую среду использовать энергию более эффективно, что делает их незаменимыми в таких областях, как электромобили и аэрокосмическая промышленность.
Двигатели постоянного тока также широко используются в электродвигателях серии МПТ, которые обладают высокими показателями момента силы и могут генерировать значительные усилия даже при низких скоростях. Такие электродвигатели находят свое применение в различных областях промышленности и технологий, где требуется точное позиционирование и большая сила, например, в системах автоматического управления и робототехнике.
Кроме того, двигатели постоянного тока могут использоваться в качестве генераторов. При подаче обратного напряжения на обмотку двигателя, он начинает действовать как генератор, преобразуя механическую энергию в электрическую. Таким образом, двигатели постоянного тока могут использоваться для генерации электричества через магнитное поле и подключаться к сети для питания электроустановок.
- Одна из современных систем, использующих двигатели постоянного тока, – это бесколлекторные двигатели постоянного тока (БДКП). Они широко применяются в электромобилях, таких как гибридные и электрические автомобили, а также в оборудовании с автономным питанием (например, дроны).
- Двигатели постоянного тока также нашли применение в системах регулирования скорости вентиляторов, кондиционеров, насосов и других устройств, требующих точного регулирования электродвигателей.
- Модуляция широты импульсов (МШИ) – это еще одно современное применение двигателей постоянного тока. Она позволяет управлять скоростью двигателя, регулируя ширину импульсов, поступающих на обмотку двигателя.
Таким образом, двигатели постоянного тока остаются актуальными и применяются во многих областях промышленности и технологий, благодаря своим уникальным характеристикам и возможностям регулирования. Их применение помогает сделать технологии более эффективными и экологически безопасными.
Электродвигатели постоянного тока: устройство, работа, виды
Устройство электродвигателей постоянного тока состоит из ряда основных компонентов. Одной из ключевых особенностей является наличие ротора и статора. Ротором называется вращающаяся часть двигателя, которая располагается в его центре. Статор, напротив, представляет собой неподвижную часть, вокруг которой располагается ротор. В центре ротора находится сердечник.
Работу электродвигателей постоянного тока осуществляют различные виды электродвигательных систем. Одним из таких видов является бесколлекторный электродвигатель. В нем отсутствуют щетки и коллектор, и электрическая энергия передается на ротор через интерфейсы электронного контроллера или инвертора. Это позволяет обеспечить лучшую настройку и эффективность работы двигателя.
Другим видом электродвигателей постоянного тока являются серия синхронных двигателей. Они обладают особым управлением и возбуждением, и питаются от однофазной или трехфазной сети. Возбуждение роторного поля осуществляется постоянными током через особые обмотки, которые расположены на полюсах индуктора.
Для регулирования работы электродвигателей постоянного тока применяются различные способы, включая изменение положения ротора или воздействие на возбуждение. Возможности регулирования позволяют получить необходимые показатели работы двигателя в различных условиях.
Однако, ряд видов электродвигателей постоянного тока также имеют определенные минусы. Например, они могут иметь большой пусковой ток или требовать настройки и обслуживания. Кроме того, электродвигатели постоянного тока могут быть более дорогими по сравнению с другими типами электродвигателей.
История электродвигателей постоянного тока началась с появления первых генераторов постоянного тока. Были разработаны все необходимые конструктивные особенности, позволяющие создать эффективные и надежные электродвигатели постоянного тока.
Таким образом, электродвигатели постоянного тока представляют собой разнообразные устройства, которые могут быть использованы в различных областях силовых и токовых действий. Их устройство и работа основываются на особых конструктивных особенностях и способах настройки. Виды электродвигателей постоянного тока включают бесколлекторные и серию синхронных двигателей, каждый из которых имеет свои особенности и применение в различных сферах.
Двигатель постоянного тока: Схемы соединения и характеристики ДПТ
ДПТ состоит из статора и ротора. В статоре располагаются восемь пазов, в которые вставляются электродвигатели серии. Возбуждение полей осуществляется с помощью источников постоянного тока. Ротор имеет шестерни, соединенные с контактами коммутатора.
Схемы соединения ДПТ включают однофазный и трехфазный варианты. В однофазном ДПТ, в отличие от трехфазного, для создания момента вращения используется только один источник напряжения. Однако, однофазные ДПТ обладают низким уровнем момента вращения в сравнении с трехфазными.
В трехфазном ДПТ применение в сети позволяет создавать максимальный момент вращения без значительных просадок. Это обеспечивается с помощью устройств управления, которые включают в себя систему модуляции широты импульсов и инвертора.
Одним из минусов ДПТ является необходимость подключения к сети постоянного тока. Однако, существуют также бесколлекторные ДПТ, в которых контакты коммутатора заменены на электрические датчики, позволяющие управлять направлением и скоростью вращения более точно.
В целом, двигатели постоянного тока считаются очень надежными и эффективными устройствами. Они находят широкое применение для привода силовых установок различных механизмов, включая машину постоянного тока, мотор-колеса для транспортных средств и другие устройства, где точность и стабильность вращения играют важную роль.
Конструкция ДПТ
Статор является неподвижным элементом и состоит из токопроводящей обмотки и коммуникационных пазов для подключения силовой сети. Ротор же является вращающимся элементом и имеет одно или несколько стержней, на которые обмотаны обмотки якоря. Эти обмотки представляют собой несколько параллельно-последовательных обмоток, сведения о которых регулируются с помощью щеток.
Ротор ДПТ может быть обратной (постоянной) или магнитопроводной конструкции. В зависимости от типа обмоток, ДПТ могут иметь различную мощность и показатели скорости вращения. Кроме того, размеры ДПТ могут быть разными в зависимости от его применения и нагрузки.
ДПТ имеют широкое применение в различных устройствах и приборах благодаря своим конструктивным особенностям. Они обладают высокой мощностью, большим количеством скоростей и частотой вращения, а также возможностью регулировки тока и температуры. ДПТ могут работать как непрерывно, так и с перерывами во времени.
ДПТ обычно имеют две обмотки — однофазную и двухфазную, что позволяет управлять направлением и скоростью движения. Некоторые ДПТ являются бесколлекторными и работают почти бесшумно.
Конструкция ДПТ может изменяться в зависимости от его типу и серии. Например, двигатели серии П52 (ПБ52) имеют особую конструкцию с микроконтроллером, что позволяет управлять различными параметрами работы, такими как скорость и ток. Они также имеют разные размеры и количество обмоток, что влияет на работу электродвигателя в различных режимах и при разной нагрузке.
Пуск двигателя постоянного тока
В основе работы двигателя постоянного тока лежит принцип работы электродвижущей силы (ЭДС) в цепи возбуждения. Для пуска двигателя необходимо создать условия для возникновения и поддержания ЭДС в цепи возбуждения, чтобы получить достаточный момент для пуска.
Все пусковые элементы двигателей постоянного тока современного исполнения располагаются на роторе. Кроме того, в устройстве двигателя применяются электромагнитные элементы, которые обеспечивают регулирование момента и скорости вращения ротора.
Для пуска двигателей постоянного тока используются различные схемы подключения статора и ротора. В зависимости от конструкции и исполнения двигателя, ротор может быть внешним и внутренним. Внешний ротор принципиально отличается от внутреннего своей конструкцией, расположением статора и ротора.
Одним из методов пуска двигателя постоянного тока является использование генератора электрической энергии. Для этого генератор, подключенный к сети питания, обеспечивает пусковые и рабочие характеристики двигателя. Другими методами пуска является использование регулирования токовой петли и применение драйверам для управления пуском и работой двигателя.
Плюсы использования генератора в пуске двигателя постоянного тока включают возможность регулирования скорости и мощности двигателя, а также стабильную работу при изменении нагрузки.
Крайне важным аспектом пуска двигателя постоянного тока является правильное соединение статора и ротора, а также наличие достаточного количества зарядов и возбуждающий магнитный поток в сердечнике статора.
Пуск двигателя постоянного тока – это сложный процесс, требующий точной и своевременной работы всех элементов его устройства. Качество пуска и его длительность непосредственно влияют на последующую работу двигателя и его показатели.
Регулирование скорости вращения
.jpg)
Регулирование скорости вращения двигателей постоянного тока осуществляется с помощью специально разработанных устройств, которые делятся на два основных типа: п51 и п52.
Двигатели типа п51 представляют собой электродвигатель постоянного тока, у которого регулирование скорости вращения осуществляется через возбуждение. Для этого используется обмотка возбуждения, подсоединённая к питающему источнику с помощью интерфейсов. Зависимость скорости от возбуждения может быть представлена либо линейной, либо нелинейной функцией. В зависимости от конструктивных особенностей и принципа работы магнитной системы генератора, такие двигатели могут иметь однофазные обмотки или обмотки в серии.
Двигатели типа п52 являются бесколлекторными двигателями постоянного тока, управление скоростью вращения ротора которых осуществляется путем подключения и отключения рабочих контактов на короткозамкнутых полюсах статора. Принцип работы таких двигателей основан на изменении положения габаритных обмоток на роторе с помощью электрической обмотки возбуждения. Сопротивление, которое подключается к обмотке возбуждения, определяет скорость вращения ротора.
Регулирование скорости вращения двигателей постоянного тока позволяет контролировать и изменять их движение в различных устройствах и оборудовании. Оно осуществляется с помощью подключения различных сопротивлений или интерфейсов, а также изменения параметров питающего источника.
Таким образом, регулирование скорости вращения является важной характеристикой для электродвигателей постоянного тока и позволяет адаптировать их работу к различным условиям и требованиям.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Такие двигатели обладают рядом плюсов по сравнению с коллекторными электродвигателями постоянного тока. Бесколлекторные двигатели имеют большую мощность и высокую скорость вращения. Они также более эффективны, так как сокращается количество затрат энергии на создание внешнего магнитного поля и силу, требуемую для запуска и пуска таких двигателей. Их размеры также меньше, что делает их более компактными и удобными в использовании.
Присоединительные размеры электродвижущей машины П52 в основном используются для общих сведений и характерных приложений. Для всех методов подключения этих двигателей требуется специальное исполнение.
Действие пусковой функции обычно осуществляется посредством использования асинхронных моторов и контактора для обеспечения пуска и остановки электродвигателя с плавным изменением его номинальной скорости.
Трехфазные бесколлекторные двигатели постоянного тока обладают большим количеством преимуществ и перспектив в использовании. Их независимая скорость вращения ротора, возможность управления направлением вращения и длительное время работы без простоев делают их очень привлекательными для многих промышленных и бытовых приложений.
Устройство электродвигателя
Основные компоненты электродвигателя:
| Статор | Ротор |
| Неподвижный элемент электродвигателя. Состоит из обмотки, называемой намагничивающей или индукционной обмоткой, и магнитных полюсов. | Вращающийся элемент электродвигателя. Принцип его работы основан на взаимодействии с магнитным полем статора. |
Ротор электродвигателя может осуществлять вращение вследствие применения разных принципов. В классификации электродвигателей различаются:
| Асинхронные электродвигатели | Синхронные электродвигатели | Бесколлекторные электродвигатели |
| Вращение ротора осуществляется вследствие разности скоростей статорного полюса и ротора. | Вращение ротора происходит согласованно по магнитному полю статора. | В этих устройствах отсутствуют щетки и коммутаторы. Вместо этого используется система микроконтроллера. |
Асинхронные электродвигатели имеют большой классификационный разброс и наиболее широкое применение. Синхронные электродвигатели также нашли свое применение в системах, где требуется точная модуляция скорости вращения ротора.
Бесколлекторные электродвигатели, также называемые моторами BLDC (brushless DC motor), являются более энергоэффективными и имеют более высокую плотность мощности по сравнению с коллекторными электродвигателями и асинхронными электродвигателями.
Классификация МПТ по способу питания обмоток индуктора и якоря
История развития двигателей постоянного тока привела к появлению различных систем питания обмоток индуктора и якоря. Современное можно сказать, что двигатели постоянного тока можно классифицировать по способу питания обмоток индуктора и якоря.
Одним из самых распространенных способов питания является питание через проводники постоянным напряжением. В данной конструкции, обмотка индуктора и обмотка якоря подключены параллельно и снабжены независимыми источниками питания постоянным напряжением.
Другой способ питания — это питание через переменное напряжение с помощью обратной последовательным и параллельно-последовательным инвертора. Действие этих устройств приводит к созданию переменного напряжения на обмотках индуктора и якоря, что позволяет управлять скоростью вращения двигателя.
Третий способ питания, называемый «п51», осуществляется с помощью драйверов управления и схем регулирования напряжения. Существуют различные типы «п51», включая источники питания постоянного тока, создающие электрическую схему и интерфейсы связи.
Использование разных способов питания может повлиять на показатели работы электродвигателя. Так, например, при использовании питания постоянным напряжением весь двигатель работает со своим максимальным напряжением и движется со своей собственной скоростью. При использовании питания через обратную последовательность обмоток, двигатель может двигаться в обратном положении, а при использовании параллельно-последовательного соединения обмоток индуктора, можно достичь фазного действия.
Классификация МПТ по способу питания обмоток индуктора и якоря является важным аспектом в изучении конструкции и принципа действия электродвигателей постоянного тока. Эти элементы считаются ключевыми в использовании МПТ и соответствующих моторов, которые, в свою очередь, считаются историческими изобретениями современной техники.
С независимым возбуждением
Двигатели с независимым возбуждением включают в себя якорь, статор и коммуникационные устройства. Якорь является основой двигателя и состоит из проводников, обмотанных на сердечник. Статор представляет собой токопроводящую обмотку, обмотанную на сердечник, которая создает магнитное поле. Коммуникационные устройства подсоединены к якорю и статору и используются для управления двигателем.
Принцип работы двигателей с независимым возбуждением основан на взаимодействии магнитных полей якоря и статора. При подаче питания на обмотку статора создается магнитное поле, которое воздействует на якорь. Благодаря этому в якоре возникает ток, который вызывает вращение ротора. Таким образом, двигатель преобразует энергию электрическую в механическую.
Двигатели с независимым возбуждением могут быть использованы как в режиме работы постоянного тока, так и в режиме работы бесколлекторными двигателями. В первом случае для их работы необходимо постоянное питание, которое подается на статор. Во втором случае двигатели с независимым возбуждением осуществляют преобразование энергии от переменного пускового тока или инвертора в постоянный ток, который питает статор. Такие двигатели обладают большими возможностями в применении и могут работать с различными параметрами.
Конструкция двигателей с независимым возбуждением позволяет подсоединять их к однофазным и трехфазным источникам питания. С помощью специально строящейся коммутации обмотки якоря эти двигатели могут работать как с параллельно-последовательным подключением, так и с последовательным подключением фаз. При этом осуществляется действие на якорь почти без зависимости от поля ротора.
Особенности двигателей с независимым возбуждением позволяют использовать их в различных областях. Они применяются в качестве электрических двигателей и генераторов. Их устройство и работа напрямую зависят от вида поля, и в зависимости от этого они могут выпускаться различные исполнения.
С параллельным возбуждением
С параллельным возбуждением якорь был подключен к сети, а индуктора к контроллеру оборудования. Это позволяло генерировать электрическую мощность в зависимости от скорости и нагрузки, которые были на двигателе.
Современное оборудование с параллельным возбуждением имеет множество преимуществ и недостатков. Одним из плюсов является большой момент на нагрузке и высокая скорость вращения, а также возможность регулировки скорости и мощности двигателя.
Классификация двигателей с параллельным возбуждением основывается на принципе их работы. Между обмотками статора и якорем создается электрические интерфейсы, которые позволяют управлять двигателем.
Одним из видов двигателей с параллельным возбуждением является бесколлекторный двигатель. Он имеет более современную схему управления и не требует настройки коммутатора. Такие двигатели имеют хорошие перспективы использования в различных сферах промышленности и были установлены на многих мощных генераторах и инверторах.
С параллельным возбуждением двигатель постоянного тока находится в постоянном взаимодействии с электрической сетью. Устройства с параллельным возбуждением являются более сложными в устройстве и требуют более сложной настройки, но они обладают высокой надежностью и продолжительным сроком службы.
С последовательным возбуждением
Системы с последовательным возбуждением имеют некоторые особенности, которые важно понять при работе с ними. Они чаще всего используются в оборудовании, которое требует регулировки скорости двигателя. Такие системы способны генерировать электрическую энергию под различными параметрами и настраиваться под определенную нагрузку.
Элементы системы с последовательным возбуждением располагаются между двигателем и коммутатором, и обеспечивают создание электрической цепи между якорем и генераторами. Такая цепь позволяет осуществлять электрическую регулировку скорости двигателя, включая его изменение в зависимости от нагрузки и температуры.
Двигатели с последовательным возбуждением являются трехфазным типом системы, которые считаются более независимыми в использовании, чем однофазные системы. Они также имеют плюсы в работе, такие как большее количество интерфейсов и возможность работы с различными генераторами.
- Системы с последовательным возбуждением обладают возможностью настройки скорости двигателя, что позволяет исключить частые остановки при работе под различной нагрузкой.
- Они эффективно работают при изменении частоты электродвижущей силы и создают действие, которое осуществляется с использованием регулирования генераторов и источников питания.
- Двигатели с последовательным возбуждением имеют способность генерировать электрическую энергию при синхронных и асинхронных режимах работы.
- Использование систем с последовательным возбуждением позволяет регулировать движение двигателя в зависимости от требуемой скорости и величины электродвижущей силы.
С параллельно-последовательным смешанным возбуждением
Двигатели постоянного тока с параллельно-последовательным смешанным возбуждением представляют собой особый вид двигателей, который сочетает в себе преимущества параллельного и последовательного возбуждения. Эти двигатели широко используются в различных устройствах, где требуется высокая скорость при пусковой нагрузке или изменении скорости.
Основной принцип работы таких двигателей заключается в том, что они имеют два независимых возбуждения: одно для якоря, и другое для поля. При этом возбуждение якоря происходит параллельно, а возбуждение поля — последовательно.
Схема подключения таких двигателей включает в себя две обмотки — одна для якоря, а другая для поля. Обмотка якоря подключается параллельно, а обмотка поля — последовательно.
При работе двигателя с параллельно-последовательным смешанным возбуждением важную роль играет уровень напряжения и сопротивления контактов щеток. Меняя эти параметры, можно контролировать скорость двигателя и его работу в зависимости от нагрузки.
Одной из особенностей таких двигателей является их высокая скорость при пусковой нагрузке. Благодаря комбинированному возбуждению, двигатель способен развивать высокий крутящий момент уже с начала движения.
Кроме того, двигатели с параллельно-последовательным смешанным возбуждением имеют возможность изменять скорость в обратной зависимости от нагрузки. Это свойство позволяет им работать в различных условиях и эффективно управлять движением.
В целом, двигатели постоянного тока с параллельно-последовательным смешанным возбуждением являются особым видом двигателей, сочетающих в себе преимущества параллельного и последовательного возбуждения. Эта конструкция стала основой для создания более современных и эффективных устройств, таких как электродвигатели с трехфазным обратным смешанным возбуждением или двигатели с использованием инвертора для управления скоростью.
Плюсы – минусы
- Бесколлекторный тип двигателей постоянного тока имеет ряд преимуществ перед классическими коллекторными двигателями.
- Особенности конструкции и работы бесколлекторных двигателей позволяют достичь высокой надежности и долговечности.
- Использование бесколлекторных моторов позволяет создать компактную конструкцию с малыми габаритными размерами.
- Двигатели постоянного тока с бесколлекторным ротором обычно обладают высоким крутящим моментом.
- Работа этих двигателей осуществляется с использованием трехфазных обмоток, что позволяет более точно настраивать параметры работы мотора.
- Бесколлекторные двигатели поддерживают плавный пуск и регулировку скорости в широком диапазоне.
- Устройство управления бесколлекторным двигателем не зависит от его скорости и момента, что позволяет более эффективно реализовывать функцию регулировки.
- Магнитная петля создается при помощи коммутатора, что позволяет добиться равномерности вращения ротора.
- Время реакции бесколлекторных двигателей на изменение параметров среды, в которой они работают, гораздо меньше, чем у классических коллекторных двигателей.
Однако у бесколлекторных двигателей постоянного тока также есть некоторые недостатки:
- Более сложная конструкция и смешанный режим работы требуют более сложной и дорогой системы управления.
- Настройка параметров работы требует более высокой квалификации специалистов.
- Большое количество элементов и магнитных стержней в конструкции двигателя оказывают влияние на его габаритные размеры.
- Независимые обмотки двигателя требуют более сложной схемы подключения и настройки.
- В работе бесколлекторных двигателей постоянного тока может возникать электрическая петля, что может приводить к нежелательным эффектам.
Подключение к однофазным и трехфазным источникам питания
Двигатели постоянного тока могут быть подключены к различным источникам питания, включая однофазные и трехфазные.
Подключение к однофазному источнику питания осуществляется с использованием коммутатора, который позволяет изменять направление тока в обмотке ротора. В случае однофазного питания, одна из обмоток статора является источником питающего напряжения, а вторая обмотка соединяется с ротором. Переменное напряжение питания создается специальными генераторами, которые обеспечивают пусковой момент и позволяют двигателю работать с различными скоростями вращения.
Подключение к трехфазному источнику питания осуществляется через три проводника, каждый из которых соединяется с одной из трех обмоток статора. Такие двигатели считаются более эффективными и надежными благодаря своей конструкции и использованию трехфазного питания.
Технические элементы, такие как индукторы, коммутаторы, роторы и статоры, располагаются внутри электродвигателя и работают в зависимости от входящих напряжений и сопротивления. Для создания вращающего момента в электродвигателе требуется правильная настройка данных элементов.
Электродвигатели постоянного тока, подключенные к трехфазным источникам питания, являются наиболее распространенными видами двигателей в промышленном оборудовании. Использование трехфазного питания позволяет улучшить эффективность работы и достичь более высоких скоростей вращения.
При подключении к трехфазному источнику питания, параллельным элементом используется токоограничивающий резистор. Он помогает ограничить поток тока, чтобы защитить двигатель от перегрева.
Однако, электродвигатели постоянного тока также могут быть подключены к однофазным источникам питания, хотя в таких условиях их использование чаще всего ограничивается до небольших мощностей и ограниченного времени работы из-за более сложной настройки и ниже скорости вращения.
Современное применение и перспективы
Современные электродвигатели постоянного тока, такие как бесколлекторные электродвигатели, насаженные на статор и ротор с устройствами посредством специально сконструированных соединений, имеют широкое применение в различных устройствах и системах.
Одна из главных особенностей таких электродвигателей — независимый контроль скорости движения ротора. Это позволяет эффективно регулировать нагрузку во время работы устройства. Благодаря этому, синхронные электродвигатели постоянного тока (МПТ) часто используются в приводах промышленных машин и оборудования.
Принцип действия бесколлекторных электродвигателей базируется на создании электрической системы с тремя фазами и магнитном поле, насаженном на ротор. Отклонение от этого принципа приводит к созданию асинхронных электродвигателей, которые считаются менее эффективными в сравнении со синхронными.
Бесколлекторные электродвигатели имеют ряд преимуществ перед своими коллекторными аналогами. Они обладают высоким КПД и низким уровнем шума. Благодаря магнитному возбуждению системы обеспечивается стабильность работы и возможность контроля над скоростью вращения.
Современные электродвигатели постоянного тока находят применение не только в приводах промышленных машин, но и в системах автоматического управления, робототехнике, электромобилях, и других устройствах. Они интегрируются в различные силовые и управляющие цепи, обеспечивая передачу энергии и контроль над параметрами работы.
Благодаря возможности контроля скорости и независимой работы, современные электродвигатели постоянного тока находят применение в таких отраслях, как авиация, медицина, энергетика и другие. Они являются незаменимыми элементами в различных современных устройствах, обеспечивая эффективную работу и достижение поставленных задач.
Принцип работы
Принцип работы двигателей постоянного тока основан на использовании электромагнитного поля и электрических параметров. Эти устройства питаются от постоянного источника энергии, такого как батарея или постоянное напряжение из сети.
Для понимания принципа работы электродвигателей постоянного тока, следует рассмотреть их конструкцию. В основе этих двигателей лежат магнитные поля, создаваемые вращающимся ротором и стоячим полюсами. Ротор представляет собой серию проводников, называемых обмотками, расположенных в пазах ротора. Полюса располагаются вокруг ротора и имеют форму, позволяющую создавать магнитное поле.
Работу электродвигателей постоянного тока можно описать следующим образом. Под воздействием постоянного напряжения от источника питания или инвертора, возбуждение магнитного поля создается в стоячих обмотках. Это поле «выталкивает» ротор, образуя тяговую силу, которая приводит к вращению ротора. Скорость вращения ротора зависит от параметров электрической сети и способа соединения обмоток.
Существует несколько способов соединения обмоток электродвигателей постоянного тока. Наиболее распространенными являются последовательное и параллельное соединение обмоток. При последовательном соединении обмотки подсоединяются друг к другу плюсом к минусу, что позволяет увеличить скорость вращения ротора и уменьшить момент возбуждения. При параллельном соединении обмотки подсоединяются плюсом к плюсу и минусом к минусу, что позволяет увеличить момент возбуждения и уменьшить скорость вращения.
В оборудовании электродвигателей постоянного тока часто используется модуляция ширины импульсов (МШИ), которая позволяет эффективно управлять скоростью вращения ротора. Этот метод основан на изменении ширины импульсов постоянного напряжения, которое подается на обмотки двигателя.
Особенности электродвигателей постоянного тока связаны с их конструкцией и техническими параметрами. Размеры и количество обмоток, способ соединения, режим работы и многое другое влияют на работу и возможности электродвигателей.
Преимуществами электродвигателей постоянного тока являются высокая точность управления скоростью и возможность работы при низких скоростях. Однако у них также есть недостатки, такие как высокое сопротивление, что приводит к потерям энергии. Кроме того, необходимость в использовании специальных устройств для изменения направления вращения и возбуждения моторов.
Классификация
Двигатели постоянного тока (ДПТ) могут быть классифицированы по различным параметрам и характеристикам. В зависимости от способа подключения к сети, эти двигатели делятся на два основных типа: самостоятельные и подсоединённые.
Самостоятельные двигатели постоянного тока работают независимо от других источников энергии. Они осуществляют вращение ротора с помощью постоянного напряжения, создаваемого электродвигателем. Такие двигатели, в свою очередь, делятся на несколько видов в зависимости от исполнения, габаритных размеров и других параметров.
Подсоединённые двигатели постоянного тока работают вместе с другими источниками энергии и подключаются, как правило, к трехфазным сетям переменного тока. В этом случае, для подачи постоянного тока на двигатель используется специальный устройство – драйвер, которое обеспечивает преобразование переменного напряжения сети в постоянное напряжение, генерируемое двигателем.
Существует несколько видов подсоединённых двигателей постоянного тока, различающихся способом применения драйвера и его конструктивными особенностями. Один из таких видов – двигатели с использованием микроконтроллера, а другой – двигатели с применением генераторов переменного тока.
Двигатели, использующие микроконтроллер, подключаются к сети при помощи драйвера, который управляет электромагнитами в обмотке двигателя с помощью команд, подаваемых с микроконтроллера. Такие двигатели имеют ряд преимуществ, такие как возможность регулировки параметров вращения и момента с помощью программной обработки данных на микроконтроллере.
Двигатели с использованием генераторов переменного тока позволяют генерировать постоянное напряжение и заряды с помощью воздействия магнитной индукции на двигатель. Этому типу двигателей свойственна высокая эффективность и точность работы, однако они ограничены в возможности регулировки своих параметров и требуют более сложной конструкции и больших габаритных размеров.
Таким образом, двигатели постоянного тока классифицируются в зависимости от типа подключения, исполнения и параметров преобразования электрической энергии. Каждый из этих видов двигателей имеет свои особенности и применение.
| Тип двигателя | Применение |
|---|---|
| Самостоятельные двигатели постоянного тока | Используются в различных областях, требующих постоянного вращения и высокой скорости работы |
| Подсоединённые двигатели постоянного тока | Применяются в современных электродвигателях, которые работают с помощью драйверов и обеспечивают регулировку скорости и момента вращения |
| Двигатели с использованием микроконтроллера | Используются в устройствах, где требуется точная и программная регулировка параметров двигателя |
| Двигатели с применением генераторов переменного тока | Применяются в задачах, где необходима высокая точность и эффективность работы двигателя |
Принцип преобразования энергии
Одной из особенностей ДПТ является наличие электродвигателя синхронного типа, где количество и положение полюсов постоянны. Это позволяет обеспечить регулирование скорости вращения двигателя.
В конструкции ДПТ есть статор, насаженный на стержни, и ротор, который может быть выполнен в виде специально обработанных поверхностей статора. Статор и ротор приближаются друг к другу с очень малым зазором, чтобы уменьшить воздействие на движение.
Для работы двигателя необходимо подключение к источникам переменного или постоянного напряжения. Постоянное напряжение считается одним из наиболее перспективных в данном устройстве, так как оборудование обмотки статора и ротора более простое по сравнению с другими типами двигателей.
В работе ДПТ количество и напряжение обмотки статора регулируются для достижения требуемой мощности и скорости вращения. Для этого используется регулирование с помощью щеток и петли обратной связи.
Применяются также бесколлекторные двигатели, где отсутствуют щетки. В этом случае регулирование происходит с помощью электронного устройства, которое подает питание на соответствующие обмотки двигателя.
При работе ДПТ особое внимание уделяется температуре и нагрузке. Также следует понимать, что электродвигатель является независимым прибором, и его работа и конструкция могут быть разделены на технические параметры и исполнение, которое определяется типом двигателя, его мощностью и возможностями.
Виды двигателей и их устройство
Современное устройство всех электродвигателей постоянного тока имеет общие принципы и структуру. Однако, в зависимости от типа двигателя и его назначения могут быть некоторые отличия.
Основными элементами двигателя постоянного тока являются якорь, статор и устройство для возбуждения магнитного поля. Якорь представляет собой основной рабочий элемент, который состоит из обмоток и сердечника. Статор предназначен для создания магнитного поля и имеет обмотки, расположенные на его полюсах. Устройство возбуждения необходимо для генерации постоянного магнитного поля и может быть выполнено с помощью внешних источников питания или обратной связи с генераторами.
В зависимости от способа подключения обмоток якоря и статора существуют два типа двигателей постоянного тока: параллельно-последовательное и трехфазное подключение.
В параллельно-последовательном подключении обмотки якоря и статора соединены параллельно между собой. При этом, обмотки якоря и статора имеют одинаковые показатели электрических сопротивлений и числа витков. Этот тип двигателей широко используется в различных областях, так как позволяет работать при различных режимах нагрузки.
В трехфазном подключении обмотка якоря и обмотки статора соединены последовательно. При этом, обмотки якоря и статора могут иметь разные показатели электрических сопротивлений и числа витков. Данный тип двигателей обычно используется в тяжелых условиях, так как обладает большой мощностью и высоким крутящим моментом.
Одним из ключевых элементов двигателя постоянного тока является якорь. Это сердечник, на который намагничиваются магнитные полюса с помощью возбуждения. Якорь впоследствии вращается внутри статора и передает энергию насаженным на него обмоткам. Кроме того, в зависимости от типа якоря (волновый, двойного действия, вставной и т.д.), можно регулировать скорость вращения вала двигателя.
Использование различных видов двигателей постоянного тока позволяет решать разнообразные задачи в различных областях промышленности. Понимание особенностей и устройства электродвигателей позволяет правильно подобрать и настроить необходимый тип двигателя для определенной задачи.
Асинхронные
Асинхронные электродвигатели представляют собой один из типов двигателей постоянного тока. Они отличаются от других типов электродвигателей особенностями своей конструкции и принципа работы.
Асинхронные электродвигатели имеют бесколлекторную систему возбуждения, что позволяет достичь высокой скорости вращения ротора. В таких двигателях якорь является независимым от возбуждения, а питающее напряжение преобразовывается с помощью драйверов и преобразователей. Благодаря этому асинхронные электродвигатели обладают такими преимуществами, как высокая эффективность, точная регулировка скорости и плавное движение.
Классификация асинхронных электродвигателей основана на способе возбуждения ротора. Существует несколько типов асинхронных электродвигателей: основные, роторные и двигатели серии. Они различаются по характеристикам и параметрам, таким как скорость вращения, система возбуждения и токовая нагрузка.
В современном оборудовании и промышленных системах асинхронные электродвигатели нашли широкое применение. Они используются в таких устройствах как генераторы, моторы, драйверы и системы коммуникационного оборудования. Асинхронные электродвигатели являются основой для регулировки скорости и направления движения различных механизмов и оборудования.
Асинхронные электродвигатели имеют ряд достоинств, таких как высокая эффективность, надежность и точная регулировка скорости. Однако у них также есть некоторые минусы, включая высокую стоимость и сложность конструкции. Поэтому выбор асинхронного электродвигателя должен осуществляться с учетом особенностей конкретной задачи и требований к оборудованию.
В целом, асинхронные электродвигатели являются важным элементом в современной промышленности и электротехнике. Их использование позволяет решать различные задачи по энергоснабжению, преобразованию электрической энергии и регулировке движения механизмов.
Синхронные
При использовании синхронных двигателей для работы насаженного на ротор модуляции постоянное напряжение подводится к смешанным двигателям, подключенным к электрической сети. Контакты этого устройства следует подсоединить к токопроводящей части коммутатора. Это позволит осуществить электродвигателю работу на прямом токе и управлять скоростью его движения, даже при воздействии различных температур и других факторов среды.
Синхронные электродвигатели имеют сложную конструкцию и большие габаритные размеры. Овощи пазов и скорости движения ротора между шестернями устройства могут быть разными. Для этих двигателей характерно использование трехфазного исполнения. Но также синхронные электродвигатели могут быть однофазными. Они могут быть как коллекторными, так и бесколлекторными. Ротор генератора такого двигателя располагается внешним образом к индуктору.
Синхронные двигатели могут использоваться для работы в режиме генератора. В этом случае они генерируют электрическое напряжение и мощность подключаемой нагрузки. Они имеют возможность работать на постоянном токе при подключении к смешанным обмоткам ротора. В таком режиме работы обмотка индуктора подключается к одному трети обмоток ротора, а другая треть подключается к ротору генератора. Такое подключение позволяет обеспечить стабильное напряжение и работу генератора в режиме постоянного напряжения.
Бесколлекторный электродвигатель постоянного тока: Общие сведения и устройство прибора
Устройство БДКП состоит из двух основных частей: статора и ротора. Статор представляет собой неподвижную часть двигателя, на которой располагаются обмотки. Ротор же, наоборот, является вращающейся частью, на которой установлены магниты или магнитопровод. В рабочем состоянии между статором и ротором создается магнитное поле, которое вызывает вращение ротора.
Для создания магнитного поля в БДКП используются постоянные магниты или магнитопровод со встроенными катушками, обеспечивающими магнитную индукцию. При подаче питающего напряжения на обмотки статора, в зависимости от типа двигателя (однофазный, двухфазный, трехфазный), возникает момент электродвижущей силы. При наличии магнитных полей на роторе, возникает момент, воздействующий на него, что приводит к вращению ротора. Бесколлекторные электродвигатели часто применяются в механизмах, где необходимо добиться постоянности момента вращения или изменять его в зависимости от требуемой нагрузки или скорости.
Бесколлекторные электродвигатели имеют ряд преимуществ по сравнению с традиционными электродвигателями постоянного тока. Во-первых, они обеспечивают более высокую мощность и эффективность, так как отсутствие щеток и коммуникаторов исключает потери энергии на трение и искровой разряд. Во-вторых, БДКП имеют меньшие габаритные размеры и массу, что особенно важно для применения в автомобилях и других транспортных средствах. Кроме того, постоянное магнитное поле не требует внешнего возбуждения, что делает БДКП более надежными и удобными в использовании.
В зависимости от вида применяемого магнитного поля и вида управления моментом, существует несколько видов БДКП. Наиболее распространенные варианты – это магнитные полупроводниковые двигатели (МПТ) и магнитопроводные двигатели постоянного тока (МПДТ). МПТ используют магнитные полупроводники, такие как гибридные магниты или нанокристаллические магниты, для создания постоянного магнитного поля. МПДТ же используют магнитопроводы, в которых предусмотрены дополнительные катушки для регулировки магнитного поля и момента.
- БДКП имеют высокую мощность и эффективность.
- Они не требуют внешнего возбуждения, благодаря чему более надежны и удобны в использовании.
- У них меньшая масса и габаритные размеры по сравнению с традиционными таковыми.
- БДКП применяются в механизмах, где требуется постоянность или изменение момента вращения.
Статор
Статор состоит из обмоток, которые делятся на несколько фаз, и соединениями между ними. Количество фаз может быть разным в зависимости от типа двигателя – однофазные электродвигатели, двухфазные и трехфазные системы.
Обмотки статора генерируют магнитное поле при подключении источникам постоянного тока через коммуникационные интерфейсы, такие как системы управления или генераторы. Создаваемый токовой петлей магнитный поток пронизывает обмотки ротора и вызывает его вращение.
Условно статор можно разделить на две части – обмотки и их соединения. Обмотки статора, в свою очередь, представляют собой смешанный пукнт по скорости из разных частей, которые в свою очередь выпускаются согласно техническим требованиям. Разные типы двигателей имеют свои особенности принципа подключения обмоток и их обозначения.
Ротор
Ротор является ключевым компонентом в работе двигателей постоянного тока. Использование различных типов роторов может влиять на показатели мощности, момента и эффективности двигателя.
Возбуждение ротора осуществляется либо постоянным магнитом, специально созданным на сердечнике ротора, либо индукцией прибора посредством электрических соединений с индуктора.
В бесколлекторных двигателях используются различные способы возбуждения ротора, такие как коммутаторы или микроконтроллеры. Эти способы позволяют управлять током в обмотках ротора и обеспечивать контролируемое изменение момента двигателя.
Размеры ротора и система его подсоединённых обмоток влияют на уровень возбуждения и характеристики двигателя. Обмотки, подсоединенные к ротору двигателя, создают магнитное поле, которое взаимодействует с магнитным полем индуктора и вызывает вращение ротора.
Температура ротора также влияет на его работу. При работе двигателей постоянного тока нагрев ротора может быть существенным, особенно при высоких нагрузках и длительных периодах работы. Поэтому важно следить за температурой ротора и принимать меры для его охлаждения.
Короткозамкнутые обмотки ротора могут быть использованы для создания зарядов на роторе и генерирования электрического тока. Этот ток может быть использован для преобразования энергии и питания других систем или устройств.
Применение контактов или коммутаторов на роторе позволяет управлять направлением и скоростью вращения ротора, что делает двигатели постоянного тока универсальными и приспособленными для различных задач.
Таким образом, роторы двигателей постоянного тока являются ключевыми компонентами, обеспечивающими преобразование электрической энергии в механическое движение. Различные типы роторов и их конструкция позволяют достичь оптимальных показателей двигателей постоянного тока в зависимости от поставленных задач и требований к бесперебойной работе.
Система управления
Система управления электродвигателем постоянного тока (ЭДПТ) обеспечивает возбуждение и движение ротора. В более современных ЭДПТ, таких как бесколлекторные двигатели, система управления состоит из микроконтроллера, инвертора и драйверов. Они позволяют управлять обмотками статора и ротора, создавая постоянное возбуждение и управляя скоростью вращения.
Пусковой момент и режим работы двигателя настраиваются с помощью управляющих сигналов, которые формируются микроконтроллером. Разъемы, располагающиеся на устройствах системы управления, позволяют осуществлять подсоединение этих устройств к цепи питания, а также подключение к серийным интерфейсам.
Системы управления двигателями постоянного тока делятся на два типа: однофазные и многофазные. Однофазные системы используются для управления двигателями небольшой мощности, таких как мпт-12, пб52 и другие. Многофазные системы используются для управления более мощными электродвигателями.
В системах управления многофазными двигателями используются различные принципы контроля, один из которых называется «петля обратной связи». Он позволяет поддерживать стабильный уровень тока в обмотках статора в зависимости от потребности в мощности. Помощью этого принципа система управления может регулировать скорость вращения ротора.
Для управления двигателем постоянного тока с помощью системы управления требуется наличие технических средств. Они включают в себя микроконтроллер, инвертор, драйверы, интерфейсы для подключения к внешним устройствам и сеть питания.
Использование систем управления в ЭДПТ предоставляет значительные преимущества, такие как повышенная точность, независимость от уровня напряжения в сети, более эффективная работа и возможность настройки параметров двигателя.
Все эти технические достоинства позволяют повысить мощность и эффективность работы электродвигателей постоянного тока, открывая новые перспективы в их использовании.
Общие технические характеристики электродвигателей постоянного тока П51 П52
Одним из главных преимуществ электродвигателей П51 и П52 является их возможность работать с различными типами питающих источников энергии, включая однофазные, трехфазные, а также специально созданные системы питания. Они могут быть подключены к источнику переменного напряжения или постоянного напряжения.
Также электродвигатели П51 и П52 обладают бесколлекторным возбуждением, то есть отсутствием щеток и индуктора. Вместо этого используется электроника, осуществляющая управление обмотками статора истроителем для создания необходимого магнитного поля. Это дает ряд преимуществ, такихкак высокую надежность и длительный срок службы, и исключает такие минусы, как износ щеток и потери энергии на их трение.
Еще одной важной характеристикой электродвигателей П51 и П52 является возможность регулирования скорости вращения. Это достигается с помощью контроллера, который модулирует напряжение питания электродвигателя в зависимости от требуемого значения скорости. Такой принцип регулирования позволяет эффективно использовать энергию и управлять двигателем в широком диапазоне скоростей.
Кроме того, электродвигатели П51 и П52 имеют возможность работать как в режиме самостоятельного генератора, так и в режиме мотора. В режиме генератора они могут преобразовывать механическую энергию в электрическую с помощью фазного контроллера и подключения к внешней нагрузке. В режиме мотора они создают механическое движение под действием электрического тока.
Еще одной интересной особенностью электродвигателей П51 и П52 является возможность параллельно-последовательного подключения двигателей при необходимости увеличения мощности или регулирования их работы. Также в этих двигателях применяется короткозамкнутое возбуждение, позволяющее достичь высокой степени автоматизации контроля работы двигателя.
Общие технические характеристики электродвигателей П51 и П52 включают такие элементы, как тип управления (бдкп, микроконтроллера), типы подключения (однофазным, трехфазным), особенности возбуждения (бесколлекторные, параллельно-последовательные), диапазон температур, возможность работы в различных режимах и другие параметры, которые являются важными при выборе и использовании этих двигателей в различных сферах применения.
Условные обозначения двигателей постоянного тока серии П
Одна из главных характеристик двигателей серии П это их магнитное поле, которое создается в магнитной системе, состоящей из сердечника и обмоток. Магнитная модуляция, которая происходит в магнитных полях, обеспечивает работу двигателя и его регулировку.
Существует классификация двигателей серии П по их подключению в сеть питания. Они делятся на асинхронные и синхронные. Асинхронные двигатели ПБ52, например, располагаются внешними по отношению друг к другу обмотками и обладают характеристиками, близкими к обмоткам параллельными. Синхронные же двигатели П52 обладают большой регулировкой момента и могут работать как в параллельном, так и в последовательном режиме.
На современном оборудовании двигатели постоянного тока серии П чаще всего представляются в виде бесколлекторных моторов, которые имеют общие особенности и характеристики. Они обеспечивают работу соединений с другими коммуникационными средствами и имеют функцию регулирования момента при работе.
Между тем, в истории двигателей серии П можно найти общие работы и исследования, которые раскрывают особенности и ход их развития. Например, двигатель МПТ питающее напряжение работает по принципу одна фаза и поэтому часто считается однофазным двигателем.
- Двигатели П52, ПБ52, и МПТ относятся к серии П;
- Двигатели серии П являются генераторами постоянного тока;
- Двигатели серии П работают как в однофазном, так и в параллельно-последовательном режиме;
- Двигатели серии П имеют магнитное поле, создаваемое в магнитной системе;
- Двигатели серии П разделяются на асинхронные и синхронные;
- Двигатели серии П представлены в виде бесколлекторных моторов;
- Двигатели серии П имеют функцию регулировки момента при работе;
- Двигатель МПТ считается однофазным двигателем, который работает по принципу одна фаза.
Габаритные и присоединительные размеры двигателей постоянного тока П51 П52 ПБ51 ПБ52
П51 и П52 — это классификация двигателей постоянного тока, в которой П51 обозначает однофазные двигатели с постоянным возбуждением, а П52 — трехфазные двигатели с постоянным возбуждением. ПБ51 и ПБ52 представляют большой токовую систему с двумя полюсами и обладают очень высокими показателями мощности и скорости вращения.
Габаритные размеры двигателей представляют собой информацию о размере корпуса и элементов, насаженных на него. Присоединительные размеры указывают на наличие и типы интерфейсов, к которым можно подключить двигатель. Общие размеры двигателей П51, П52, ПБ51 и ПБ52 могут различаться в зависимости от их классификации и параметров.
Электрические особенности двигателей постоянного тока П51, П52, ПБ51 и ПБ52 заключаются в наличии токопроводящей системы, якоря, обмоток возбуждения, источникам питания и преобразования полей. Двигатели могут быть подсоединены параллельно-последовательным или однофазным способом.
Двигатели постоянного тока П51, П52, ПБ51 и ПБ52 имеют свои уникальные особенности в сравнении с другими типами двигателей, такими как асинхронные и бдкп. Они представляют систему с короткозамкнутым ротором и применяются в различных системах и устройствах благодаря своим параметрам и характеристикам.
Классификация и размеры двигателей П51, П52, ПБ51 и ПБ52 предоставляют различные сведения о габаритах и присоединительных размерах этих двигателей. Они могут быть использованы для выбора и монтажа двигателей в соответствии с требованиями и потребностями конкретной системы или устройства.
Видео:
Эпизод 149 — Человек за бортом! Будущее восстановления наших лодок #boatrestoration
Эпизод 149 — Человек за бортом! Будущее восстановления наших лодок #boatrestoration by Ship Happens 45,907 views 12 hours ago 58 minutes
